Μουστάκας Κωνσταντίνος ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Ηλεκτρονικό σύστημα μέτρησης απόστασης και ταχύτητας με την χρήση υπερήχων Μουστάκας Κωνσταντίνος
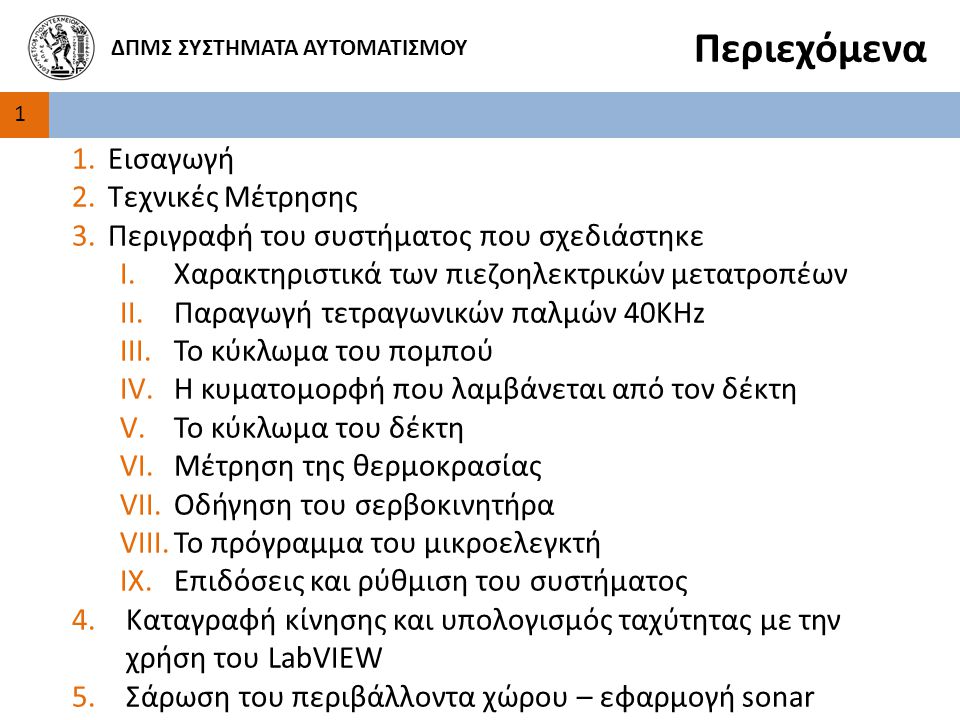
Περιεχόμενα Εισαγωγή Τεχνικές Μέτρησης ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Περιεχόμενα 1 Εισαγωγή Τεχνικές Μέτρησης Περιγραφή του συστήματος που σχεδιάστηκε Χαρακτηριστικά των πιεζοηλεκτρικών μετατροπέων Παραγωγή τετραγωνικών παλμών 40KHz Το κύκλωμα του πομπού Η κυματομορφή που λαμβάνεται από τον δέκτη Το κύκλωμα του δέκτη Μέτρηση της θερμοκρασίας Οδήγηση του σερβοκινητήρα Το πρόγραμμα του μικροελεγκτή Επιδόσεις και ρύθμιση του συστήματος Καταγραφή κίνησης και υπολογισμός ταχύτητας με την χρήση του LabVIEW Σάρωση του περιβάλλοντα χώρου – εφαρμογή sonar
Εμβέλεια: Από μερικά χιλιοστά έως μερικά μέτρα ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Εισαγωγή 3 Μέτρηση της απόστασης χωρίς επαφή: Οπτικές μέθοδοι (Laser, Υπέρυθρες) Ραδιοκύματα Υπέρηχοι (μηχανικά κύματα) Εφαρμογές: Ρομποτική: Υπέρηχοι: Ικανοποιητική ακρίβεια με μικρό κόστος, ευκολία κατασκευής και δυνατότητα χρήσης σε υποβρύχια περιβάλλοντα Αυτοκίνηση: Εμβέλεια: Από μερικά χιλιοστά έως μερικά μέτρα Βιομηχανία:
Τεχνικές Μέτρησης (Ι) 1. Τεχνική pulse – echo (TOF) ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Τεχνικές Μέτρησης (Ι) 4 1. Τεχνική pulse – echo (TOF) Χρήση κατωφλίου ανίχνευσης: Χρήση συσχέτισης: 𝑑= 𝑣 𝑠𝑜𝑢𝑛𝑑 𝑇𝑂𝐹 2
Τεχνικές Μέτρησης (ΙΙ) ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Τεχνικές Μέτρησης (ΙΙ) 5 2. Μέτρηση της διαφοράς φάσης Η διαφορά της μετατόπισης φάσης δύο κυμάτων διαφορετικών συχνοτήτων αυξάνεται με την απόσταση Χρήση μιας ή περισσότερων συχνοτήτων Για μια συχνότητα υπάρχει ασάφεια στον συσχετισμό απόστασης – διαφοράς φάσης για Δφ>2π⟹ 𝑑 𝑚𝑎𝑥 = 1 2 𝜆 (επειδή το κύμα διανύει την διπλάσια απόσταση) Για 40KHz λ=8,5mm Για μεγαλύτερες αποστάσεις χρησιμοποιούνται δύο ή περισσότερες συχνότητες ή σύνθετες τεχνικές με διαμορφωμένους παλμούς (AM, BFSK) 𝑑= 1 2 Δφ 2𝜋 𝑣 𝑠𝑜𝑢𝑛𝑑 Δf
Περιγραφή του συστήματος ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Περιγραφή του συστήματος 6 Χρησιμοποιείται η τεχνική TOF με κατώφλι ανίχνευσης (threshold) 𝑣 𝑎𝑖𝑟 𝑚/𝑠 =331,3+ 0,606 𝑜 𝐶 −1 ⋅𝜃
Πιεζοηλεκτρικοί μετατροπείς ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Πιεζοηλεκτρικοί μετατροπείς 7 Κεντρική Συχνότητα 40 ± 1 KHz Εύρος ζώνης -6db 1.2 KHz Πίεση ηχητικού κύματος (στα 40KHz με αναφορά τα 0.0002 μbar με οδήγηση 10Vrms στα 30 εκατοστά) 120 dB Ευαισθησία λήψης (στα 40ΚHz με αναφορά στα 1V/μbar) -63 dB Ονομαστική εμπέδηση 900 Ω Χρόνος αποκατάστασης (εναπομένουσες ταλαντώσεις) 1.5 ms max Χωρητικότητα (1KHz) 2400 pF Μέγιστη τάση οδήγησης (πλάτος παλμού 0.5ms, χρόνος μεταξύ παλμών 50ms) 120 Vp-p Θερμοκρασία λειτουργίας -30οC έως 80oC Γωνιακό άνοιγμα 60ο TCT40-16 R/T
Παραγωγή παλμών 40ΚΗz ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 8 Απαιτείται έλεγχος σε χαμηλό επίπεδο των χρονιστών του ATMEGA328 Χρησιμοποιούνται για την παραγωγή PWM κυματομορφών Περιέχουν prescaler για την διαίρεση του ρολογιού Οι λειτουργία των χρονιστών καθορίζεται από τους καταχωρητές TCCRnA και TCCRnB Δυνατότητα λειτουργίας σε Fast PWM ή Phase Correct PWM Ακριβής έλεγχος της συχνότητας με την ειδική λειτουργία Toggle OCnA on Compare Match Η τιμή της εξόδου αλλάζει κάθε φορά που ο μετρητής γίνεται ίσος με OCnA Παράγονται συμμετρικοί τετραγωνικοί παλμοί
Παραγωγή παλμών 40ΚΗz ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 9 Χρησιμοποιείται ο timer2 (8 bit) Οι καταχωρητές που ελέγχουν τον timer2 ρυθμίζονται ως εξής: TCCR2A – [COM2A1, COM2A0, COM2B1, COM2B0, reserved, reserved, WGM21, WGM20] = 01000011 TCCR2B – [FOC2A,FOC2B,reserved,reserved,WGM22,CS22,CS21,CS20] = 00001001 Μεταβολή της λογικής τιμής της εξόδου όταν ο μετρητής γίνει ίσος με OCR2A COM2Ax = 01 CS2x = 001 Η τιμή του prescaler γίνεται 1 WGM2x = 111 Fast PWM με Toggle OC2A on Compare Match 𝑂𝐶𝑅2𝐴=199⟹200 𝜅ύ𝜅𝜆𝜊𝜄 ⟹ 𝑇 2 = 200 16𝑀𝐻𝑧 =0.0000125𝑠 𝑇=0.000025𝑠 ⟹𝑓=40𝐾𝐻𝑧
Το κύκλωμα του πομπού ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 10 Μετατροπή του επίπεδου τάσης TTL (5V) των εξόδων του ATMEGA328 Οδήγηση του πιεζοηλεκτρικού μετατροπέα εκπομπής με H-Bridge για διπλασιασμό της peak to peak τάσης Δημιουργία των κατάλληλων σημάτων λειτουργίας του H-bridge μέσω πυλών NAND
Το κύκλωμα του πομπού ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 11 Τα τρανζίστορ λειτουργούν στον κόρο ως διακόπτες διότι 𝛽⋅𝐼𝑏≅133𝑚𝐴 ⟹ 𝑉 𝑐 =133𝑉 άτοπο Για V 𝑏 =5𝑉 το τρανζίστορ άγει και η τάση κόρου 𝑉 𝐶𝐸 ≅0,2𝑉 (λογικό 0) Για V 𝑏 =0𝑉 το τρανζίστορ βρίσκεται στην αποκοπή και η τάση στον συλλέκτη είναι VCC Το ρεύμα βάσης θα πρέπει να είναι σχετικά μικρό για να μην υπερφορτώνεται ο μικροελεγκτής, αρκετό όμως για να οδηγεί το τρανζίστορ στον κόρο 𝛪 𝑏 = 5−0.7𝑉 3.3𝐾𝛺 =1.3𝑚𝐴
Το κύκλωμα του πομπού ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 12 Η αντιστροφή δεν επηρεάζει τους τετραγωνικούς παλμούς ενώ το σήμα transmitter_enable λειτουργεί με αντίστροφη λογική οριζόμενη από το πρόγραμμα
Το κύκλωμα του πομπού ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 13 Αποτελείται από δύο ομάδες συμπληρωματικών τρανζίστορ npn και pnp Εάν In1=In2=1 ή In1=In2=0, τα npn ή τα pnp αντίστοιχα άγουν ταυτόχρονα βραχυκυκλώνοντας την έξοδο, άρα Vout=0 (διαφορική) Εάν In1=0 και In2=1 άγουν τα Q1 και Q4 𝑉 𝑜𝑢𝑡 = 𝑉 𝑐𝑐 −0,4𝑉 (τα τρανζίστορ λειτουργούν στον κόρο) Εάν In1=1 και In2=0, άγουν τα Q2 και Q3 𝑉 𝑜𝑢𝑡 =− 𝑉 𝑐𝑐 −0,4𝑉 Σε μια περίοδο μετάβαση από τα 8,6V στα -8,6V άρα 17,2Vp-p (για Vcc=9V) 𝛪 𝑏 = 𝑉 𝑐𝑐 −0.7 3.3𝛫𝛺 = 8.3𝑉 3.3𝛫𝛺 =2.5𝑚𝐴
Το κύκλωμα του πομπού Λειτουργία παύσης της εκπομπής ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του πομπού 14 Λειτουργία παύσης της εκπομπής Vcc Vcc Φ 1
Το κύκλωμα του πομπού Λειτουργία εκπομπής παλμοσειράς 40KHz ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του πομπού 15 Λειτουργία εκπομπής παλμοσειράς 40KHz 0 Vcc Vcc 0 0 Vcc 1 1 0 Επιλέχθηκε λογική CMOS διότι η τάση εξόδου των πυλών πρέπει να κυμαίνεται στα όρια της τροφοδοσίας Εάν η διαφορά είναι μεγαλύτερη από 0.7V, θα έχουμε παρασιτικό ρεύμα διαρροής στα τρανζίστορ κάθε κλάδου (Q1-Q2) και (Q3-Q4) Ο χρόνος μετάβασης των πυλών πρέπει να είναι όσο το δυνατόν ταχύτερος Για το ολοκληρωμένο HCF4011 είναι 50ns
ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του πομπού 16
Το κύκλωμα του πομπού ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 17 Εκπομπή παλμοσειράς 500μs (20 κύκλοι) Παύση εκπομπής για 35ms (αναμονή ανακλώμενου κύματος) Η εμπέδηση του πιεζοκρυστάλλου δεν είναι ωμική αλλά κυρίως χωρητική Υπάρχει ένα μεταβατικό φαινόμενο φόρτισης – εκφόρτισης και η κυματομορφή δεν είναι καθαρά τετραγωνική Υπάρχουν αιχμές ρεύματος στην περιοχή μετάβασης που παράγουν θόρυβο Χρησιμοποιείται πυκνωτής στην τροφοδοσία (decoupling) για μείωση του θορύβου
Η κυματομορφή που λαμβάνεται ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Η κυματομορφή που λαμβάνεται 18 Η κυματομορφή που λαμβάνεται από ανάκλαση σε επιφάνεια που απέχει 213cm σε θερμοκρασία 30ο C 𝑣 𝑠𝑜𝑢𝑛𝑑 =331+0.6⋅30 𝑚/𝑠=349 𝑚/𝑠 𝑑=349 12.2 2000 𝑚=213𝑐𝑚 Παρεμβολή από τον πομπό
Η κυματομορφή που λαμβάνεται ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Η κυματομορφή που λαμβάνεται 19 Η μορφή του παλμού που λαμβάνεται είναι ημιτονική λόγω του στενού εύρους ζώνης του πιεζοηλεκτρικού στοιχείου λήψης (ηλεκτρομηχανικός συντονισμός) Απόκριση δευτέρου βαθμού – το πλάτος δεν γίνεται άμεσα μέγιστο αλλά υπάρχει μεταβατικό φαινόμενο. Μειώνεται η ακρίβεια κατά την ανίχνευση με μέθοδο κατωφλίου
ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του δέκτη 20
Το κύκλωμα του δέκτη Παραγωγή DC offset ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 21 Οι Τ.Ε του πρώτου σταδίου και του φίλτρου χρειάζονται αμφιπολική τροφοδοσία (+,-,Gnd) για να ενισχύσουν AC σήματα Χρησιμοποιείται μια τεχνική δημιουργίας εικονικής γείωσης στο μέσο της τροφοδοσίας Προστίθεται ένα δυναμικό ίσο με Vcc/2 στο σήμα εισόδου ως DC offset Συνεπώς μπορεί να χρησιμοποιηθεί απλή τροφοδοσία (+, Gnd) για να είναι το σύστημα απλούστερο στην χρήση και στην μεταφορά
Το κύκλωμα του δέκτη Ενισχυτής πρώτου σταδίου ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του δέκτη 22 Ενισχυτής πρώτου σταδίου V 𝑅2 = 𝑉 − − 𝑉 𝑜𝑢𝑡 = 𝑉 + − 𝑉 𝑜𝑢𝑡 =𝛪⋅ 𝑅 2 = 𝑉 𝑖𝑛 − 𝑉 + 𝑅 2 𝑅 1 ⟹ 𝑉 𝑜𝑢𝑡 = 𝑉 + 1+ 𝑅 2 𝑅 1 − 𝑉 𝑖𝑛 𝑅 2 𝑅 1 𝑉 𝑖𝑛 = 𝑉 + + 𝑉 𝑠𝑖𝑔𝑛𝑎𝑙𝑖𝑛 Χρήση αναστροφικού ενισχυτή για εύκολη πρόσθεση του DC offset Αρνητική ανάδραση μέσω της R2 συνεπώς τα δυναμικά των εισόδων του Τ.Ε πρακτικά εξισώνονται 𝑉 𝑜𝑢𝑡 = 𝑉 + 1+ 𝑅 2 𝑅 1 − 𝑉 + + 𝑉 𝑠𝑖𝑔𝑛𝑎𝑙𝑖𝑛 𝑅 2 𝑅 1 = 𝑉 + − 𝑉 𝑠𝑖𝑔𝑛𝑎𝑙𝑖𝑛 𝑅 2 𝑅 1
Το κύκλωμα του δέκτη Ενισχυτής πρώτου σταδίου ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του δέκτη 23 Ενισχυτής πρώτου σταδίου Α 𝜃𝜀𝜔𝜌𝜂𝜏𝜄𝜅ό = 𝑅 2 𝑅 1 = 100𝐾𝛺 1𝛫𝛺 =100 75mV 1,59V Α=21,2 Η διαφορά οφείλεται στον πραγματικό τελεστικό ενισχυτή TL082. GBW=4MHz
Το κύκλωμα του δέκτη Ενισχυτής πρώτου σταδίου ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του δέκτη 24 Ενισχυτής πρώτου σταδίου Η χωρητική σύζευξη στην είσοδο δημιουργεί ένα υψιπερατό φίλτρο RC με C1=10nF και R1=1ΚΩ. 𝑓 𝑐 = 1 2𝜋 𝑅 1 𝐶 1 =15,9𝐾𝐻𝑧
Το κύκλωμα του δέκτη Ζωνοπερατό φίλτρο με ενίσχυση ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του δέκτη 25 Ζωνοπερατό φίλτρο με ενίσχυση 𝛨 𝑏𝑝 𝑠 = −𝛫 𝜔 0 𝑄 𝑠 𝑠 2 + 𝜔 0 𝑄 𝑠+ 𝜔 0 2 𝛫= 𝑅 5 𝐶 3 𝑅 3 𝐶 2 + 𝐶 3 =9 𝜔 0 𝑄 = 𝐶 2 + 𝐶 3 𝑅 5 𝐶 2 𝐶 3 =3,3⋅ 10 4 f0=40KHz Κ=19dB Q=7,7 BW=5,2KHz 𝜔 0 = 1 𝑅 5 𝐶 2 𝐶 3 1 𝑅 3 + 1 𝑅 4 =2,53⋅ 10 5
Το κύκλωμα του δέκτη Ζωνοπερατό φίλτρο με ενίσχυση ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του δέκτη 26 Ζωνοπερατό φίλτρο με ενίσχυση Συνήθως σε MFB φίλτρα το GBW του τελεστικού πρέπει να είναι μεγαλύτερο από 100⋅ 𝑓 𝑐 ⋅𝑄=30,8𝑀𝐻𝑧 Επειδή το GBW του TL082 είναι 4MHz το κέρδος μειώθηκε στα 6dB (2V/V) Η απώλεια κέρδους αντισταθμίζεται χρησιμοποιώντας ενίσχυση στον ανιχνευτή κορυφής
Το κύκλωμα του δέκτη Ζωνοπερατό φίλτρο με ενίσχυση ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του δέκτη 27 Ζωνοπερατό φίλτρο με ενίσχυση To DC δυναμικό του σήματος στην είσοδο του φίλτρου ισούται με το DC δυναμικό αναφοράς του φίλτρου (Vcc/2) Το σήμα εξακολουθεί να <<επιπλέει>> σε ένα DC δυναμικό 1,59V 3,14V Α=2
Το κύκλωμα του δέκτη Ζωνοπερατό φίλτρο με ενίσχυση ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του δέκτη 28 Ζωνοπερατό φίλτρο με ενίσχυση Λόγω της χρονικής απόκρισης του φίλτρου αυξάνεται επιπλέον η καθυστέρηση που εισάγει το σύστημα στην μέτρηση Γίνεται αντιστάθμιση του συστηματικού αυτού σφάλματος μέσω του software
Το κύκλωμα του δέκτη Voltage Clamper ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 29 Πρέπει να αφαιρεθεί η DC συνιστώσα του σήματος και στην συνέχεια να ανορθωθεί. Εάν χρησιμοποιούνταν πυκνωτής σε συνδυασμό με κλασικό ανορθωτή με δίοδο, οι αρνητικές κορυφές του σήματος θα περικόπτονταν Έτσι χάνεται μεγάλο μέρος του πλάτους και της ενέργειας του σήματος Χρησιμοποιείται κύκλωμα μετατόπισης της DC τιμής ενός AC σήματος κατά το πλάτος του με πυκνωτή και δίοδο (voltage clamper)
Το κύκλωμα του δέκτη Voltage Clamper ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 30 Η λειτουργία του κυκλώματος βασίζεται στην μεταβολή του μονοπατιού του ρεύματος φόρτισης του πυκνωτή ανάλογα με την ημιπερίοδο Κατά την αρνητική ημιπερίοδο ο πυκνωτής φορτίζεται σε δυναμικό 𝑉 𝐶 =− 𝑉 𝑝 − 𝑉 𝐷 Η χρονική σταθερά RC επιλέγεται αρκετά μεγάλη ώστε η τάση στα άκρα του πυκνωτή να μεταβάλλεται ελάχιστα όταν δεν άγει η δίοδος Η τιμή του πυκνωτή επιλέγεται μικρή ώστε να φορτίζεται γρήγορα Στην επόμενη θετική ημιερίοδο η Vc προστίθεται στο σήμα εισόδου ⟹ V 𝑜 =2 𝑉 𝑝 − 𝑉 𝐷 Στην επόμενη αρνητική ημιερίοδο η Vc αφαιρείται από το σήμα εισόδου ⟹ V 𝑜 =− 𝑉 𝐷
Το κύκλωμα του δέκτη Voltage Clamper ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 31 Ο πυκνωτής σε συνδυασμό με την αντίσταση φορτίου δημιουργούν ένα υψιπερατό φίλτρο αποκόπτοντας το DC offset του σήματος εισόδου 𝑉 𝑚𝑎𝑥 =3,14− 𝑉 𝐷 =2,88𝑉 𝑓 𝑐 = 1 2𝜋 𝐶 4 𝑅 6 =338𝐻𝑧
Το κύκλωμα του δέκτη Voltage Clamper ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 32 Χρησιμοποιήθηκε δίοδος Schottky λόγω της μικρής ορθής τάσης πόλωσης 𝑉 𝐷 ≅0.2𝑉 και του μικρού χρόνου αποκατάστασης 𝑑𝑉 𝑑𝑡 ≅10000𝑉/𝜇𝑠
ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του δέκτη 33 Ανιχνευτής κορυφής με ενίσχυση και μηδενισμό της εξόδου
ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του δέκτη 34 Ανιχνευτής κορυφής με ενίσχυση και μηδενισμό της εξόδου Εφόσον αποκατασταθεί η ανάδραση: 𝐼 9 = 𝑉 𝑜𝑢𝑡𝑐𝑙𝑎𝑚𝑝𝑒𝑟 𝑅 9 𝑉 𝐶9 = 𝐼 9 𝑅 9 + 𝑅 10 = 𝑉 𝑜𝑢𝑡𝑐𝑙𝑎𝑚𝑝𝑒𝑟 1+ 𝑅 10 𝑅 9 = 𝑉 𝑜𝑢𝑡𝑐𝑙𝑎𝑚𝑝𝑒𝑟 ⋅4,3 Χρησιμοποιείται ο LM358 (single supply op amp) Ο πυκνωτής στην έξοδο αποθηκεύει την μέγιστη τιμή της εισόδου ενισχυμένη κατά 1+ 𝑅 10 𝑅 9 Η δίοδος D2 (Scottky) άγει μόνο εφόσον η τιμή του σήματος εισόδου ξεπεράσει την προηγούμενη μέγιστη τιμή. Τότε η τάση της εξόδου θα γίνει ίση με το νέο μέγιστο
ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του δέκτη 35 Ανιχνευτής κορυφής με ενίσχυση και μηδενισμό της εξόδου Aθεωρητικό=4,3 Η διαφορά οφείλεται στο πεπερασμένο εύρος ζώνης του LM358 (GBW=1.1MHz) 2,88V 3,14V Α=2,6 𝐴 𝑡𝑜𝑡𝑎𝑙 = 7.41𝑉 75𝑚𝑉 =98,8
ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του δέκτη 36 Ανιχνευτής κορυφής με ενίσχυση και μηδενισμό της εξόδου Σε κάθε νέο κύκλο μέτρησης η τάση εξόδου πρέπει να μηδενίζεται για χρόνο ίσο με τον χρόνο ηρέμησης των ταλαντώσεων λόγω παρεμβολών Το σήμα MCU_detector_reset ενεργοποιεί ένα MOSFET ισχύος το οποίο λειτουργεί ως διακόπτης Έχει πολύ μικρή αντίσταση καναλιού (<1Ω) και γειώνει την έξοδο Η αντίσταση στην πύλη περιορίζει το ρεύμα φόρτισης της Cg για προστασία του μικροελεγκτή
ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το κύκλωμα του δέκτη 37 Ανιχνευτής κορυφής με ενίσχυση και μηδενισμό της εξόδου Η έξοδος μηδενίζεται για 100ms μετά την λήξη της εκπομπής, δηλαδή συνολικά για 600ms.
Το κύκλωμα του δέκτη Συγκριτής κατωφλίου ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 38 Συγκριτής κατωφλίου Παράγεται ένας παλμός όταν το σήμα στην έξοδο του ανιχνευτή κορυφής ξεπεράσει ένα ρυθμιζόμενο κατώφλι Το κατώφλι ρυθμίζεται μέσω ενός ποτενσιόμετρου και η τιμή του εξαρτάται από τον θόρυβο Χρησιμοποιείται ένας Τ.Ε LM358 σε συνδεσμολογία ανοικτού βρόγχου ως συγκριτής Ο θετικός κόρος του LM358 ισούται με Vcc-1,5V δηλαδή ο παλμός της εξόδου κυμαίνεται από 7,5V έως 16,5V Η μέγιστη τάση εισόδου του ATMEGA328 είναι 5,5V Η τάση εξόδου σταθεροποιείται με την χρήση διόδου Zener Vz=5,1V 7,5𝑉−5,1𝑉 1𝛫𝛺 < 𝐼 𝑧 < 16,5𝑉−5,1𝑉 1𝛫𝛺 ⟹2,4𝑚𝐴< 𝐼 𝑧 <11,4𝑚𝐴
Το κύκλωμα του δέκτη Συγκριτής κατωφλίου ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 39 Συγκριτής κατωφλίου Μόλις η τάση ξεπεράσει το κατώφλι (820mV) παράγεται ένας θετικός παλμός πλάτους 5V Ο χρόνος ανόδου εξαρτάται από το slew rate του LM358 (0,6V/μs) Από V=0V έως V=5V μεσολαβούν 8μs τα οποία προστίθενται στην καθυστέρηση του συστήματος
Το κύκλωμα του δέκτη Συγκριτής κατωφλίου ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 40 Συγκριτής κατωφλίου Η χρονική καθυστέρηση από την λήψη της ανάκλασης έως την παραγωγή του παλμού είναι περίπου 75μs και οφείλεται στο πεπερασμένο εύρος ζώνης του πιεζοκρυστάλλου, στην χρονική απόκριση του φίλτρου και στον χρόνο ανόδου του παλμού του συγκριτή
Το κύκλωμα του δέκτη Συγκριτής κατωφλίου ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 41 Συγκριτής κατωφλίου Το συστηματικό σφάλμα αντισταθμίζεται μέσω του software αφαιρώντας 75μs από τον μετρούμενο χρόνο (TOF) αυξάνοντας την ακρίβεια 75𝜇𝑠≅2,5𝑐𝑚 Το σφάλμα εξαρτάται από την απόσταση, όμως το σφάλμα που προέρχεται από την εξασθένιση είναι πλέον μικρό (2.5-5mm)/m
Μέτρηση της θερμοκρασίας ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Μέτρηση της θερμοκρασίας 42 Χρησιμοποιείται ο μονολιθικός αισθητήρας θερμοκρασίας LM35. Η έξοδός του αυξάνεται 10mV/οC και το σφάλμα του είναι ±0,25οC
Μέτρηση της θερμοκρασίας ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Μέτρηση της θερμοκρασίας 43 Η τάση στην έξοδο του LM35 μετατρέπεται σε ψηφιακή μέσω του ενσωματωμένου ADC 10-bit του ATMEGA328 Η τάση πλήρους κλίμακας (Full Scale) της μετατροπής είναι προρυθμισμένη στα 5V ενώ μπορεί να τεθεί στα 1,1V μέσω της εσωτερικής τάσης αναφοράς του ATMEGA328 Οι συνηθισμένες συνθήκες λειτουργίας είναι μέχρι περίπου 45οC. Η τάση εξόδου του LM35 κυμαίνεται από 0 έως 450mV. Για βελτίωση της ακρίβειας και μείωση του σφάλματος κβαντισμού (q/2) τίθεται FS=1,1V 𝑞= 𝐹𝑆 2 𝑛 = 𝐹𝑆 1024 =1,074𝑚𝑉 𝑞 2 =0,573𝑚𝑉 → 0,0573 𝑜 𝐶 𝑡𝑒𝑚𝑝( 𝑜 𝐶)=𝐴𝐷𝐶_𝑣𝑎𝑙𝑢𝑒⋅0,001074
Οδήγηση του σερβοκινητήρα ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Οδήγηση του σερβοκινητήρα 44 Η οδήγηση γίνεται με παλμούς μεταβαλλόμενης διάρκειας από 1ms έως 2ms με χρόνο ανανέωσης 20ms Η παραγωγή των παλμών γίνεται μέσω της βιβλιοθήκης Servo.h που ελέγχει τους timers του ATMEGA328 δίνοντας την επιθυμητή τιμή της γωνίας (0ο-180ο) Χρησιμοποιήθηκε ο AC-12 mini servo με ροπή ίση με 5Kg∙cm και τάση τροφοδοσίας 5V
Το πρόγραμμα του ATMEGA328 ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Το πρόγραμμα του ATMEGA328 45
Επιδόσεις και ρύθμιση ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 46 Η διακριτική ικανότητα περιορίζεται από το μήκος κύματος (8,5mm) Η ελάχιστη απόσταση καθορίζεται από: Το χρονικό διάστημα εκπομπής Τον χρόνο προστασίας από παρεμβολές Το χρονικό διάστημα εκπομπής επηρεάζει άμεσα την μέγιστη εμβέλεια. Όσο μεγαλύτερο τόσο μεγαλύτερη η συνολική ενέργεια που εκπέμφθηκε και τόσο μεγαλύτερο το πλάτος του σήματος στον δέκτη (μέχρι ένα όριο το φαινόμενο δεν είναι γραμμικό) 𝑑 𝑚𝑖𝑛 = 𝑣 𝑠𝑜𝑢𝑛𝑑 20𝑜𝐶 ⋅ 𝑇𝑂𝐹 𝑚𝑖𝑛 2 = 340𝑚/𝑠 2 ⋅600𝜇𝑠=10,2𝑐𝑚
Επιδόσεις και ρύθμιση ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 47 Επειδή μπορεί το σύστημα να βρεθεί εκτός εμβέλειας και να μην ληφθεί παλμός, χρησιμοποιείται η μεταβλητή sensing_enable σε συνδυασμό με μια καθυστέρηση 35ms που καθορίζει το μέγιστο χρονικό διάστημα της μέτρησης Αυτό είναι ίσο με 35+0,5+0,1=35,6ms από την στιγμή της εκπομπής Εάν δεν ληφθεί παλμός σε αυτό το διάστημα εμφανίζεται στην οθόνη “Out of Range” Συνεπώς οι παράμετροι που ρυθμίζουν την λειτουργία του συστήματος, αλληλοεξαρτώνται και πρέπει να επιλέγονται ανάλογα με τα επιθυμητά χαρακτηριστικά μέσα όμως στα όρια διακύμανσής τους είναι: Τάση τροφοδοσίας Χρόνος εκπομπής Χρόνος προστασίας από παρεμβολές Τάση κατωφλίου 𝑑 𝑚𝑎𝑥 = 𝑣 𝑠𝑜𝑢𝑛𝑑 20𝑜𝐶 ⋅ 𝑇𝑂𝐹 𝑚𝑎𝑥 2 = 340𝑚 𝑠 2 ⋅35,6𝑚𝑠=6𝑚 Η κατανάλωση είναι 90mΑ
Υπολογισμός ταχύτητας ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Υπολογισμός ταχύτητας 48 Η μέτρηση της απόστασης και η γωνία αποστέλλεται κάθε 100ms σειριακά Μπορεί με κατάλληλο software να δημιουργηθεί ένας πίνακας χρόνου – θέσης και το αντίστοιχο διάγραμμα (καταγραφή κίνησης) Με αριθμητική διαφόριση μπορεί να υπολογιστεί το διάγραμμα ταχύτητας - χρόνου Προς τα εμπρός διαφορά: Σφάλμα: 𝛰 ℎ = 𝑓 ′ 𝑡 − 𝑓 𝑡+ℎ −𝑓 𝑡 ℎ ≅ ℎ 2 𝑓 ′′ (𝑡) 𝑓 ′ 𝑡 = 𝑑𝑓 𝑑𝑡 = 𝑓 𝑡+ℎ −𝑓 𝑡 ℎ +𝑂(ℎ)= 𝑓 𝑡 2 −𝑓 𝑡 1 𝑡 2 − 𝑡 1 +𝛰(ℎ) Προς τα πίσω διαφορά: Κεντρική τιμή: 𝑓 ′ 𝑡 = 𝑓 𝑡 −𝑓 𝑡−ℎ ℎ +𝑂(ℎ) 𝑓 ′ 𝑡 = 𝑓 𝑡+ℎ −𝑓 𝑡−ℎ 2ℎ +𝑂( ℎ 2 )
Υπολογισμός ταχύτητας ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Υπολογισμός ταχύτητας 49 Το σφάλμα μπορεί να περιοριστεί, μειώνοντας το χρονικό διάστημα της μέτρησης. Υπάρχει όμως ένα όριο το οποίο αντιστοιχεί στην μέγιστη εμβέλεια (35,6ms) Εναλλακτικά ο θόρυβος και το σφάλμα μπορούν να περιοριστούν χρησιμοποιώντας ψηφιακό χαμηλοπερατό φίλτρο Η διαφόριση από την φύση της ενισχύει το υψίσυχνο περιεχόμενο ενός σήματος (θόρυβος) Χρησιμοποιείται φίλτρο Savitzky – Golay για το φιλτράρισμα και την εξομάλυνση της κυματομορφής της ταχύτητας Εάν οι συντελεστές επιλεγούν σωστά δεν αλλοιώνει το πλάτος των κορυφών του σήματος
Υποσύνολα 2Μ+1 δειγμάτων με κέντρο το n ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Υπολογισμός ταχύτητας 50 Το φίλτρο χρησιμοποιεί μια τεχνική προσέγγισης διαδοχικών υποσυνόλων των δεδομένων με πολυωνυμική συνάρτηση με την μέθοδο των ελαχίστων τετραγώνων Η τιμή του φιλτραρισμένου σήματος στο μέσο του διαστήματος κάθε υποσυνόλου προκύπτει αντικαθιστώντας στην πολυωνυμική συνάρτηση Υποσύνολα 2Μ+1 δειγμάτων με κέντρο το n 𝑝 𝑛 = 𝑘=0 𝑁 𝑎 𝑘 𝑛 𝑘 𝜀 𝛮 = 𝑛=−𝑀 𝑀 𝑝 𝑛 −𝑥[𝑛] 2 𝑦 0 =𝑝 0 = 𝑎 0
Υπολογισμός ταχύτητας ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Υπολογισμός ταχύτητας 51 Το εύρος του υποσυνόλου (side points) θα πρέπει να είναι μεγαλύτερο από το εύρος της πιο απότομης μεταβολής για καλύτερα αποτελέσματα Ο βαθμός του πολυωνύμου καθορίζει το πόσο <<ισχυρή>> είναι η εξομάλυνση Πρέπει Ν<2Μ+1. Για Ν=2Μ+1 το σήμα παραμένει αναλλοίωτο
Υπολογισμός ταχύτητας ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Υπολογισμός ταχύτητας 52
Sonar ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ 53 Οι πιεζοηλεκτρικοί μετατροπείς τοποθετήθηκαν στον άξονα περιστροφής του σερβοκινητήρα με εύρος περιστροφής ±90ο Αποστέλλεται στον μικροελεκτή ο χαρακτήρας ‘s’ για να σηματοδοτήσει την έναρξη της περιστροφής ανά 1ο Η απεικόνιση γίνεται μέσω ειδικής εφαρμογής που αναπτύχθηκε με την γλώσσα Processing
ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Τυπωμένο κύκλωμα 54
ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ Υλοποίηση 55
Ευχαριστώ για την προσοχή σας!!! ΔΠΜΣ ΣΥΣΤΗΜΑΤΑ ΑΥΤΟΜΑΤΙΣΜΟΥ The End 55 Ευχαριστώ για την προσοχή σας!!!