Κατέβασμα παρουσίασης
Η παρουσίαση φορτώνεται. Παρακαλείστε να περιμένετε

1
Süsteemiteooria ISS0010 2-1-1 E 5 EAP Juhitavus, jälgitavus, rakendused
Eduard Petlenkov TTÜ U02-303A, tel TTÜ Arvutisüsteemide instituut Arukate süsteemide keskus

2
Juhitavus, jälgitavus (A,B) JUHITAVUS Juhitavus (definitsioon)
Juht- arvuti Süsteem JUHITAVUS (A,B) Juhitavus (definitsioon) Süsteem (A,B) on täielikult juhitav parajasti siis, kui on võimalik leida selline juhttoime u(t), mis viib süsteemi algolekust x(0) suvaliselt valitud lõppolekusse x(T) etteantud aja T>0 jooksul.
 Juhitavus (definitsioon) Süsteem (A,B) on täielikult juhitav parajasti siis, kui on võimalik leida selline juhttoime u(t), mis viib süsteemi algolekust x(0) suvaliselt valitud lõppolekusse x(T) etteantud aja T>0 jooksul.")
3
Juhitavuse kriteeriumid
1. Pidevaja süsteem (A,B) on täielikult juhitav, kui maatriksi astak on n, kus n = dim[x(t)]. 2. Diskreetaja süsteem (Φ, Γ) on täielikult juhitav, kui maatriksi: astak on n, kus n = dim[x(k)]
 on täielikult juhitav, kui maatriksi. astak. on n, kus n = dim[x(t)]. 2. Diskreetaja süsteem (Φ, Γ) on täielikult juhitav, kui maatriksi: astak on n, kus n = dim[x(k)]")
4
Näide No.1 Juhitavus (SISO)
Süsteem juhitavuse sisu kus

5
Kriteerium: rank QC=n n-võrrandit u(0),u(1),,u(n-1) x(0) x(n) st. on täielikult juhitav. Jälgitavus (definitsioon) Süsteem (A,C) on täielikult jälgitav parajasti siis, kui algolek x(0) on määratav väljundi vaatluste alusel vahemikus 0 t T.
 Süsteem (A,C) on täielikult jälgitav parajasti siis, kui algolek x(0) on määratav väljundi vaatluste alusel vahemikus 0 t T.")
6
Jälgitavuse kriteeriumid
1. Pidevaja süsteem (A,C) on täielikult jälgitav, kui maatriksi astak on n, kus n = dim[x(t)]. 2. Diskreetaja süsteem (Φ, C) on täielikult jälgitav, kui maatriksi: astak on n , kus n = dim[x(k)]. Näide No.2 Jälgitavus (SISO)
 on täielikult jälgitav, kui maatriksi. astak. on n, kus n = dim[x(t)]. 2. Diskreetaja süsteem (Φ, C) on täielikult jälgitav, kui maatriksi: astak. on n. , kus n = dim[x(k)]. Näide No.2 Jälgitavus (SISO)")
7
rank Q0T = n → n-võrrandit → x(0) määramiseks.
 määramiseks.")
8
Näide No.3 Jälgitavus (SISO)
Antud veel: u(1)=1; u(2)= -1; y(1)=0, y(2)=1. Leida x(3) ? 1) rank Q0 = 2 → täielikult jälgitav 2) k=1 väljundvõrrand
=1; u(2)= -1; y(1)=0, y(2)=1. Leida x(3) 1) rank Q0 = 2 → täielikult jälgitav. 2) k=1 väljundvõrrand.")
9
k=2 k=1 olekuvõrrand k=2 Vastus:

10
Juhitavuse ja jälgitavuse rakendused
Juhtimissüsteem pidevaja süsteemi näitel süsteem tagasiside u(t)= -Kx(t) Olgu süsteem (A,B) täielikult juhitav. Mida juhtimissüsteem peab tegema? Sisuliselt on tegemist stabiliseerimissüsteemiga, mis hoiab süsteemi olekus
= -Kx(t) Olgu süsteem (A,B) täielikult juhitav. Mida juhtimissüsteem peab tegema Sisuliselt on tegemist stabiliseerimissüsteemiga, mis hoiab süsteemi olekus.")
11
* on tagasisidestatud süsteemi vabaliikumise võrrand.
Vabaliikumise võrrandi karakteristlik polünoom * kus tagasisidestatud süsteemi (soovitavad) omadused on antud φ(s) kujul; 2) võrrandist * leitakse tagasisidemaatriks K.
 omadused on antud φ(s) kujul; 2) võrrandist * leitakse tagasisidemaatriks K.")
12
Juhtimissüsteem diskreetaja süsteemi näitel
↔ on täielikult juhitav ↔ on tagasiside ↔ on tagasisidestatud süsteemi vabaliikumise võrrand Vabaliikumise võrrandi karakteristlik polünoom ? antud arvutatakse ?

13
u(t) = -Kx(t) Näide No.4 Pidevaja juhtimissüsteem: süntees, analüüs
Antud: 1) 2) u(t) = -Kx(t) 3) tagasisidestatud süsteemi karakteristlik polünoom Leida: 1) K 2) Tagasisidestatud süsteemi analüüs:
 2) u(t) = -Kx(t) 3) tagasisidestatud süsteemi karakteristlik polünoom. Leida: 1) K. 2) Tagasisidestatud süsteemi analüüs:")
14
Lahendus: 1) Juhitavuse kontroll täielikult juhitav 2) Süntees – tagasisidemaatriksi K arvutus
 Juhitavuse kontroll täielikult juhitav 2) Süntees – tagasisidemaatriksi K arvutus")
15
3) Analüüs x(0) m.o.t.t.
 Analüüs x(0) m.o.t.t.")
16
Näide No.5 Diskreetaja juhtimissüsteem: süntees, analüüs
Antud: 1) 2) 3) tagasisidestatud süsteemi karakteristlik polünoom (finiitne süsteem) ! Leida: 1) K; 2) Analüüs Lahendus: 1) Juhitavuse kontroll 2) Süntees - K arvutus
 2) 3) tagasisidestatud süsteemi karakteristlik polünoom. (finiitne süsteem) ! Leida: 1) K; 2) Analüüs. Lahendus: 1) Juhitavuse kontroll. 2) Süntees - K arvutus.")
17
3) Analüüs
 Analüüs ")
18
Jälgimissüsteem kus Võrrand on tagasisidestatud süsteemi
täielikult jälgitav u(t) y(t) kus Võrrand on tagasisidestatud süsteemi vabaliikumise võrrand.
 y(t) kus. Võrrand. on tagasisidestatud süsteemi. vabaliikumise võrrand.")
19
Vabaliikumise võrrandi karakteristlik polünoom
NB! Vabaliikumise võrrandi karakteristlik polünoom antud karakteristlik polünoom (soovitud omadused) ? Sisuliselt on L tagasisidemaatriks.
 Sisuliselt on L tagasisidemaatriks.")
20
Jälgimissüsteem diskreetaja süsteemi näitel
Olekutaastaja (olekuhindaja): Tagasisidestatud süsteemi vabaliikumise võrrand - antud ?
: Tagasisidestatud süsteemi vabaliikumise võrrand. - antud.")
21
Näide No.6 Pidevaja jälgimissüsteem: süntees, analüüs Antud: 1) 2) 3) Tadasisidestatud süsteemi karakteristlik polünoom (soovitud omadused) Leida: 1) L 2) analüüsida süsteemi
 Leida: 1) L. 2) analüüsida süsteemi.")
22
K=LT Lahendus: 1. Jälgitavuse kontroll
Veenduge, et antud süsteem on täielikult jälgitav!? 2. Süntees- tagasisidemaatriksi L arvutus ? vt. Näide No.4 ja võrdle !? K=LT

23
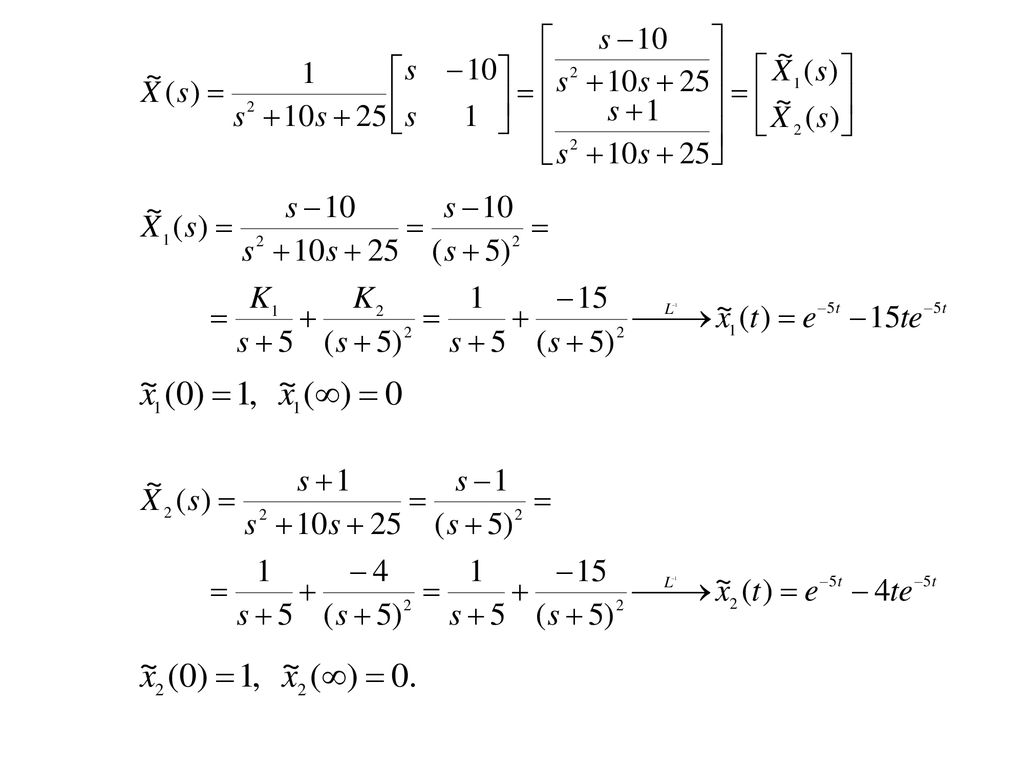
Kontroll: 3. Analüüs

25
Kontrolliks kasutame veel piirväärtusteoreeme.
m.o.t.t.

26
Näide No.7 Diskreetaja jälgimissüsteem: süntees, analüüs Antud: 1) 2) 3) Karateristlik polünoom Leida: 1) L 2) Analüüsida tagasisidestatud süsteemi ?
 L. 2) Analüüsida tagasisidestatud süsteemi.")
27
Lahendus: 1. Jälgitavuse kontroll Veenduge, et antud süsteem on täielikult juhitav. 2. Tagasisidemaatriksi L arvutus kus

28
Kontroll: 3. Analüüs k=0 k=1

29
Süsteemide dekompositsioon juhitavuse ja jälgitavuse alusel
Vaatleme probleemi näite alusel. Olgu antud süsteem kujul: Kontrollime süsteemi juhitavust? B AB A2B dim [x(t)] = 3 QC astak = 2 Süsteem ei ole täielikult juhitav
] = 3. QC astak = 2. Süsteem ei ole täielikult juhitav.")
30
Järgnevalt kontrollime süsteemi jälgitavust?
CT ATCT (AT)2CT dim [x(t)] = 3 QC astak = 2 Ei ole täielikult jälgitav Rakendame olekumudelile Laplace’i teisendust kus
2CT. dim [x(t)] = 3. QC astak = 2. Ei ole täielikult jälgitav. Rakendame olekumudelile Laplace’i teisendust. kus.")
31
Esitame võrrandid graafiliselt.
x2(0) 1 U1(s) V2(s) 1/s Y2(s) -3 Esitame võrrandid graafiliselt. x1(0) x3(0) 1 1 V1(s) V3(s) 1/s U2(s) 1/s Y1(s) -1 -5
 1. U1(s) V2(s) 1/s. Y2(s) -3. Esitame võrrandid graafiliselt. x1(0) x3(0) V1(s) V3(s) 1/s. U2(s) 1/s. Y1(s)")
32
x1(t), x2(t) – jälgitavad olekud
x2(t), x3(t) – juhitavad olekud x2(t) – juhitav ja jälgitav olek Üldistus – Kalmani dekompositsioon [ Rudolf Emil Kalman (sünd.1930)] Olekuvektor on tükeldatud x4(t) II y(t) u(t) x2(t) x4(t) I IV I – juhitav, mittejälgitav II – juhitav, jälgitav III – mittejuhitav, mittejälgitav IV – mittejuhitav, jälgitav x3(t) x4(t) III
, x3(t) – juhitavad olekud. x2(t) – juhitav ja jälgitav olek. Üldistus – Kalmani dekompositsioon [ Rudolf Emil Kalman (sünd.1930)] Olekuvektor on tükeldatud. x4(t) II. y(t) u(t) x2(t) x4(t) I. IV. I – juhitav, mittejälgitav. II – juhitav, jälgitav. III – mittejuhitav, mittejälgitav. IV – mittejuhitav, jälgitav. x3(t) x4(t) III.")
33
Olekumudel → Ülekandemudel
Ülekandemaatriks iseloomustab ainult süsteemi täielikult juhitavat ja jälgitavat osa (alamsüsteemi).
.")
Παρόμοιες παρουσιάσεις










 Περιεχόμενο και καινοτόμα στοιχεία του νέου Προγράμματος Σπουδών Λογοτεχνίας στην υποχρεωτική Εκπαίδευση.>")

>")


 και επιχειρηματική δραστηριότητα φορολογείται.>")




