Ενότητα 4η: ΣΤΕΡΕΑ ΚΑΙ ΚΙΝΗΤΑ ΣΥΣΤΗΜΑΤΑ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΙΑΣ ΣΤΑΤΙΚΗ Ι Ενότητα 4η: ΣΤΕΡΕΑ ΚΑΙ ΚΙΝΗΤΑ ΣΥΣΤΗΜΑΤΑ Διάλεξη: Εφαρμογή πάνω στο σχηματισμό πόλων και τη γραμμή βυθίσεων – έλεγχος απειροστής κινητότητας – πολυκινητά συστήματα. Καθηγητής Ε. Μυστακίδης Τμήμα Πολιτικών Μηχανικών Π.Θ.
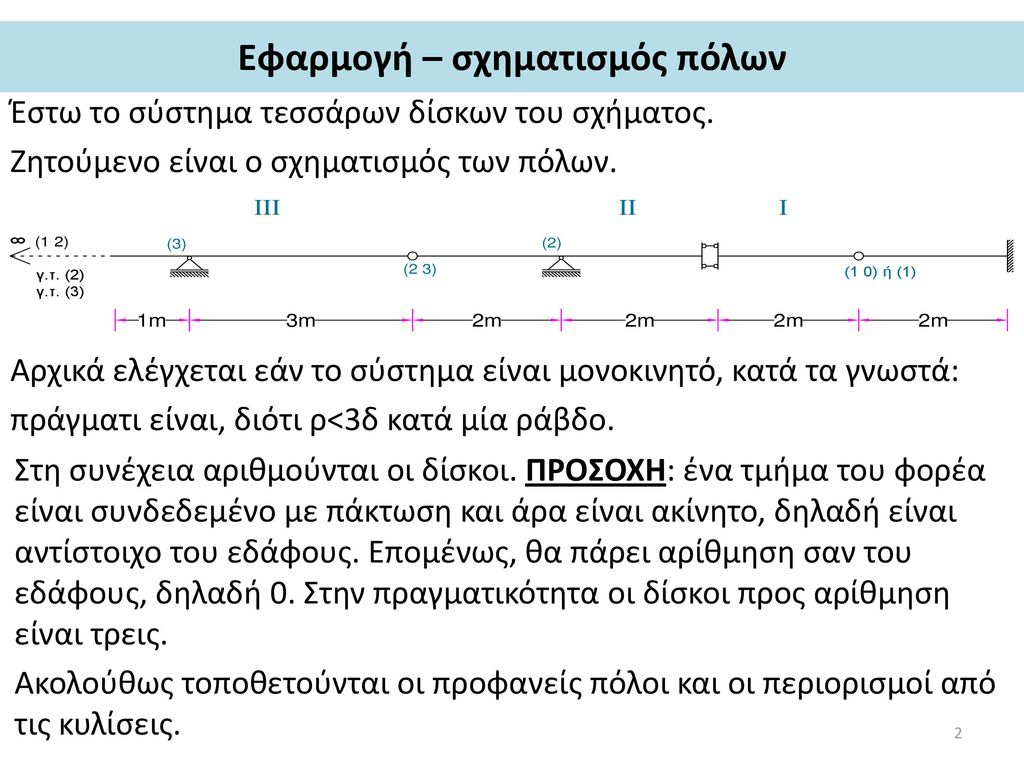
Εφαρμογή – σχηματισμός πόλων Έστω το σύστημα τεσσάρων δίσκων του σχήματος. Ζητούμενο είναι ο σχηματισμός των πόλων. Αρχικά ελέγχεται εάν το σύστημα είναι μονοκινητό, κατά τα γνωστά: πράγματι είναι, διότι ρ<3δ κατά μία ράβδο. Στη συνέχεια αριθμούνται οι δίσκοι. ΠΡΟΣΟΧΗ: ένα τμήμα του φορέα είναι συνδεδεμένο με πάκτωση και άρα είναι ακίνητο, δηλαδή είναι αντίστοιχο του εδάφους. Επομένως, θα πάρει αρίθμηση σαν του εδάφους, δηλαδή 0. Στην πραγματικότητα οι δίσκοι προς αρίθμηση είναι τρεις. Ακολούθως τοποθετούνται οι προφανείς πόλοι και οι περιορισμοί από τις κυλίσεις.
Εφαρμογή – σχηματισμός πόλων (συνέχεια) Για τις δύο παράλληλες δεσμικές ράβδους (δ.ρ.) ο πόλος περιστροφής (1 2) βρίσκεται στο άπειρο. Στη συνέχεια εφαρμόζεται το Θεώρημα τριών πόλων: + (1 2) → (2) (2 3) + (2) → (3) Από τις παραπάνω σχέσεις και τους δύο γ.τ. που προκύπτουν από τις κυλίσεις, προσδιορίζονται οι πόλοι (2) και (3).
Εφαρμογή – γραμμή βυθίσεων Για την εύρεση της γραμμής βυθίσεων του φορέα, αρχικά επιλέγεται ως παράμετρος περιγραφής της κίνησης η ω3. Χαράσεται η γραμμή βυθίσεων και προβάλλονται οι πόλοι περιστροφής. Στη συνέχεια, σχεδιάζεται η περιστροφή του δίσκου ΙΙΙ, ω3 κι έπειτα σχεδιάζονται οι κινήσεις των υπόλοιπων δίσκων. Ακολουθώντας τη γνωστή διαδικασία χαράσεται η γραμμή βυθίσεων που απεικονίζεται στο παρακάτω σχήμα.
Πρόβλημα απειροστής κινητότητας Απειροστή κινητότητα: όταν οι τρεις δεσμικές ράβδοι που απαιτούνται για την ακινητοποίηση ενός δίσκου στο επίπεδο, διέρχονται από τον πόλο περιστροφής του δίσκου. Διαδικασία αναγνώρισης απειροστής κινητότητας δίσκου: Έστω ο φορέας του σχήματος συνδεδεμένος με το έδαφος με τρεις δ.ρ. Για να διαπιστωθεί εάν ο φορέας έχει απειροστή κινητότητα, αρχικά αφαιρείται η μία ράβδος. Μετά από την αφαίρεση είναι σίγουρα μονοκινητός. Βρίσκεται ο σχηματισμός των πόλων και στη συνέχεια προστίθεται η ράβδος που έχει αφαιρεθεί.
Διαδικασία αναγνώρισης απειροστής κινητότητας Μετά την πρόσθεση της ράβδου ελέγχεται το αν προκύπτει αντίφαση στο σχηματισμό των πόλων, ή όχι. Εάν δεν προκύπτει αντίφαση, τότε ο φορέας εμφανίζει απειροστή κινητότητα. Εάν προκύπτει αντίφαση, τότε ο φορέας δεν εμφανίζει απειροστή κινητότητα και είναι ισοστατικός. ΠΑΡΑΤΗΡΗΣΗ: η παραπάνω διαδικασία εφαρμόζεται σε φορείς που μοιάζουν ισοστατικοί (δηλαδή ικανοποιούν την αναγκαία συνθήκη), αλλά δεν είναι βέβαιο ότι είναι πράγματι ισοστατικοί.
Παράδειγμα 1ο Έστω ο φορέας του σχήματος. Ζητείται η απόσταση a για την οποία ο φορέας εμφανίζει απειροστή κινητότητα.
Παράδειγμα 1ο – 1ος τρόπος επίλυσης Ουσιαστικά πρόκειται για ένα στέρεο δίσκο που συνδέεται με τρεις δ.ρ. Ζητούμενο είναι η απόσταση a ώστε η 3η δ.ρ. να διέρχεται από τον πόλο περιστροφής. Αφαιρείται η ράβδος, βρίσκεται ο σχηματισμός των πόλων και προστίθεται ξανά η ράβδος, έτσι ώστε να περνά από τον πόλο (1). Από γεωμετρία προσδιορίζεται a=4m.
Παράδειγμα 1ο – 2ος τρόπος επίλυσης Αριθμητικός υπολογισμός αντιδράσεων: αντιδράσεις στη στήριξη Α και αντίδραση s στη δ.ρ. Από συνθήκες ισορροπίας υπολογίζεται: F 𝑥 =0⇒ 𝐴 𝑥 +𝑠∗ cos 𝜑=0 F 𝑦 =0⇒ 𝐴 𝑦 −30+𝑠∗ sin 𝜑 =0 Μ Α =0⇒20∗4+10∗12−12∗𝑠∗ sin 𝜑 +3∗𝑠∗ cos 𝜑 =0⇒ ⇒200−𝑠(12∗ cos 𝜑−3∗ sin 𝜑) =0⇒𝑠= 200 12∗ sin 𝜑 −3∗ cos 𝜑
Παράδειγμα 1ο – 2ος τρόπος επίλυσης (συνέχεια) Από την τελευταία σχέση προκύπτει ότι, εάν μηδενιστεί ο παρονομαστής, η τάση s της δ.ρ. δεν μπορεί να υπολογιστεί. Η γωνία φ για την οποία συμβαίνει αυτό είναι: 12∗ cos 𝜑−3∗ sin 𝜑 =0⇒ sin 𝜑 cos 𝜑 = 1 4 ⇒ tan 𝜑 = 1 4 ⇒𝑎=4 Επομένως, για a=4m ο φορέας δεν μπορεί να επιλυθεί: εμφάνιση απειροστής κινητότητας. Για a≈4m οι τάσεις που αναπτύσσονται στη δ.ρ. είναι υπερβολικά μεγάλες.
Παράδειγμα 2ο Έστω ο φορέας του σχήματος. Ζητούμενο: είναι πάντα ισοστατικός ο φορέας, ή υπάρχει κάποια γωνία φ για την οποία παρουσιάζει απειροστή κινητότητα? Κατ’αρχήν, για το φορέα ισχύει ρ=3δ (δίσκοι:3 και δ.ρ.:9), που είναι αναγκαία αλλά όχι ικανή συνθήκη για την ισοστατικότητά του. Για να γίνει μονοκινητός ο φορέας και να εφαρμοστεί το θεώρημα των τριών πόλων αφαιρείται η μια δ.ρ. και συγκεκριμένα αυτή της κύλισης.
Παράδειγμα 2ο - επίλυση Αφού γίνει μονοκινητός ο φορέας, αριθμούνται οι δίσκοι και οι προφανείς πόλοι και εφαρμόζεται το θεώρημα των τριών πόλων: (1) + (1 2) → (2) (3) + (2 3) → (2) (1 2) + (2 3) → (1 3) (1) + (3) → (1 3) Ο σχετικός πόλος (1 3)βρίσκεται στο άπειρο.
Παράδειγμα 2ο – επίλυση (συνέχεια) Πρέπει να βρεθεί η γωνία φ για την οποία δε δημιουργείται αντίφαση στο σχηματισμό των πόλων. Προστίθεται ξανά η ράβδος της κύλισης: εάν η φ είναι τέτοια που η ράβδος να περνάει από το σημείο (2), τότε δεν υπάρχει αντίφαση στο σχηματισμό των πόλων και για αυτή τη γωνία φ ο φορέας παρουσιάζει απειροστή κινητότητα. Από γεωμετρία (αναλογία πλευρών) στο σχήμα ισχύει: 𝑥′ 𝑥 = 1.5𝑙 𝑙 =1.5 1.5𝑥=4𝑙−𝑥⇒2.5𝑥=4𝑙⇒𝑥=1.6𝑙 𝑥+ 𝑥 ′ =4𝑙⇒ 𝑥 ′ =4𝑙−𝑥 Για αυτή τη γωνία φ ο φορέας έχει απειροστή κινητότητα. tan 𝜑 = 2𝑙−𝑥 𝑥 = 2𝑙−1.6𝑙 1.6𝑙 =0.25 ΣΗΜΕΙΩΣΗ: Η αστάθεια θα εκδηλωνόταν κατά την εύρεση των αντιδράσεων: θα ήταν αδύνατο να επιλυθεί το σύστημα.
Πολυκινητά συστήματα (1) Έστω ο φορέας του σχήματος. Εάν θεωρηθεί ότι αποτελείται από ράβδους και κόμβους τότε ισχύει: Αριθμός ράβδων: 6 Αριθμός κόμβων: 4 Άρα ρ<2κ (κατά 2 ράβδους), άρα το σύστημα είναι δύο φορές κινητό. Εάν θεωρηθεί ότι αποτελείται από δίσκους και δ.ρ. τότε ισχύει: Αριθμός δίσκων: 6 Αριθμός δ.ρ.: 16 Άρα ρ<3δ (κατά 2 δ.ρ.), άρα το σύστημα είναι δύο φορές κινητό. Επομένως, μπορούν να επιλεγούν δύο παράμετροι περιγραφής της κίνησης.
Πολυκινητά συστήματα (2) Ο φορέας μπορεί να κινηθεί με πολλούς τρόπους, όπως φαίνεται και στο παραπάνω σχήμα. Μπορούν να επιλεγούν ως παράμετροι περιγραφής της κίνησης, τόσο οι μετακινήσεις δ1 και δ2, όσο και οι γωνίες στροφής φ1 και φ2. Οι παράμετροι αυτές συσχετίζονται μεταξύ τους.
Πολυκινητά συστήματα (3) Έστω ότι επιλέγονται τα φ1 και φ2. Κάθε φορά μηδενίζεται το ένα και το άλλο παραμένει ≠0. Έστω, αρχικά, τίθεται φ1≠0 και φ2=0. Αφού έχει μηδενιστεί η μία από τις δύο παραμέτρους, ο φορέας γίνεται μονοκινητός. Τότε υπολογίζεται το μέγεθος δφ1. Αντίστοιχα, τίθεται φ1=0 και φ2≠0 και έτσι προκύπτει ένα ακόμη μονοκινητό σύστημα. Τότε υπολογίζεται το μέγεθος δφ2.
Πολυκινητά συστήματα – θεώρημα Αφού προσδιοριστούν τα δ,φ1 και δ,φ2 μπορούν να προστεθούν για τον υπολογισμό της κατάστασης φ1, φ2≠0: δ,φ1+φ2=δ,φ1+δ,φ2 Η παραπάνω σχέση αποτελεί ένα ΘΕΩΡΗΜΑ που ανάγει τη μελέτη της κίνησης των πολυκινητών συστημάτων στη μελέτη της κίνησης ενός αριθμού μονοκινητών συστημάτων. Στην περίπτωση που φ1=1, φ2=1....φn=1, η παραπάνω σχέση γράφεται: δ,φ1+φ2=δ,φ1=1*φ1+δ,φ2=1*φ2+....+δ,φn=1*φn