Κατέβασμα παρουσίασης
Η παρουσίαση φορτώνεται. Παρακαλείστε να περιμένετε

1
Καθηγητής: Καλόμοιρος Ιωάννης, Αναπληρωτής Καθηγητής
ΤΕΧΝΟΛΟΓΙΚΟ ΕΚΠΑΙΔΕΥΤΙΚΟ ΙΔΡΥΜΑ ΚΕΝΤΡΙΚΗΣ ΜΑΚΕΔΟΝΙΑΣ ΣΧΟΛΗ ΜΗΧΑΝΙΚΩΝ ΠΛΗΡΟΦΟΡΙΚΗΣ Τ.Ε. ΤΟΜΕΑΣ ΑΡΧΙΤΕΚΤΟΝΙΚΗΣ ΥΠΟΛΟΓΙΣΤΩΝ & ΒΙΟΜΗΧΑΝΙΚΩΝ ΕΦΑΡΜΟΓΩΝ Ανάπτυξη ρομποτικού οχήματος με την βοήθεια μικροελεγκτή Arduino Πτυχιακή Εργασία Παπαδοπούλου Χρυσούλα ΑΜ: 2701 Καθηγητής: Καλόμοιρος Ιωάννης, Αναπληρωτής Καθηγητής

2
Σκοπός της εργασίας Η σχεδίαση και ανάπτυξη ενός ρομποτικού συστήματος που θα κινείται ελεύθερα στο χώρο με την βοήθεια του Arduino Uno και με σκοπό την αποφυγή εμποδίων. Προγραμματίστηκε σε γλώσσα Wirring στο περιβάλλον ανάπτυξης Arduino IDE. Ο μικροελεγκτής Atmel ATmega 328 δέχεται εντολές από τον υπολογιστή με την βοήθεια καλωδίου Usb.

3
Χρησιμοποιήθηκαν: Arduino Uno. Διακόπτες επαφής
Αισθητήρας υπερήχων HC-SR04 Ρομποτικό όχημα πλατφόρμας Vex Robotics.

4
Arduino Αναπτύχθηκε από ένα φοιτητή στα πλαίσια μιας εργασίας. Ιταλία 2003 Απευθυνόταν σε ανθρώπους μη σχετικούς με την τεχνολογία.

5
Arduino Uno To Arduino Uno είναι μια πλακέτα ανάπτυξης συστημάτων και
περιέχει: 14 ψηφιακές εισόδους/εξόδους (εκ των οποίων 6 PWM) 6 αναλογικές εισόδους 1 σειριακή θύρα Έως 40ma ανά έξοδο Εξόδους 5V & 3.3V Τροφοδοσία μέχρι 12V Μνήμη (μικροελεγκτής Atmel Atmega 328) 32 KB, 2KB SRAM, 1KB EEPROM
 6 αναλογικές εισόδους. 1 σειριακή θύρα. Έως 40ma ανά έξοδο. Εξόδους 5V & 3.3V. Τροφοδοσία μέχρι 12V. Μνήμη (μικροελεγκτής Atmel Atmega 328) 32 KB, 2KB SRAM, 1KB EEPROM.")
6
Λειτουργία των Σερβοκινητήρων (1)
Οι servos είναι κυρίως DC κινητήρες με ενσωματωμένο σύστημα γραναζιών και κύκλωμα ελέγχου ανάδρασης. Με τον όρο αρνητική ανάδραση εννοούμε όταν σε ένα σύστημα το σήμα εξόδου Υ, αφαιρείται από το σήμα εισόδου R, με αποτέλεσμα να έχουμε στην είσοδο ένα σήμα ελέγχου E.

7
Λειτουργία των σερβοκινητήρων (2)
Λειτουργία των σερβοκινητήρων (2) Ένας τυπικός servo motor διαθέτει ένα 3-pin καλώδιο που δέχεται τρεις εισόδους: Την τάση τροφοδοσίας μέσω του κόκκινου καλωδίου Την γείωση μέσω του μαύρου καλωδίου Το σήμα ελέγχου μέσω του λευκού ή κίτρινου καλωδίου Ο έλεγχος ενός σερβοκινητήρα γίνεται μέσω του σήματος ελέγχου, δηλαδή, με ένα τετραγωνικό παλμό (PWM). Βασικό πλεονέκτημα των σερβοκινητήρων είναι ότι έχουν ακρίβεια και μπορούν να περιστρέφονται σε υψηλές ταχύτητες.
 Ένας τυπικός servo motor διαθέτει ένα 3-pin καλώδιο που δέχεται τρεις εισόδους: Την τάση τροφοδοσίας μέσω του κόκκινου καλωδίου. Την γείωση μέσω του μαύρου καλωδίου. Το σήμα ελέγχου μέσω του λευκού ή κίτρινου καλωδίου. Ο έλεγχος ενός σερβοκινητήρα γίνεται μέσω του σήματος ελέγχου, δηλαδή, με ένα τετραγωνικό παλμό (PWM). Βασικό πλεονέκτημα των σερβοκινητήρων είναι ότι έχουν ακρίβεια και μπορούν να περιστρέφονται σε υψηλές ταχύτητες.")
8
Αισθητήρας υπερήχων HC-SR04
Τον αισθητήρα υπερήχων τον χρησιμοποιούμε όταν θέλουμε να υπολογίσουμε την απόσταση του οχήματος από τα εμπόδια. Εκτιμούν την απόσταση ενός στόχου λαμβάνοντας υπόψη τους την αντανάκλαση ενός ραδιοκύματος ή ενός ηχητικού σήματος πάνω στο στόχο. Η απόσταση που μπορεί να υπολογίσει είναι από 2εκ. έως 3 μέτρα. Χρησιμοποιεί ήχο υψηλής συχνότητας (40 kHz).
.")
9
Πλατφόρμα Vex Robotics
Ρομποτικό κιτ Πληθώρα εξαρτημάτων Δυνατότητα πολλαπλών ρομποτικών συστημάτων Λογισμικό και εγχειρίδιο

10
Υλοποίηση κατασκευής

11
Αποφυγή εμποδίων Καθώς κινείται στο χώρο παίρνει μετρήσεις με τον αισθητήρα σε τακτά χρονικά διαστήματα. Προχωράει ευθεία έως ότου βρει κάποιο εμπόδιο στο δρόμο του. Αν ανιχνεύσει εμπόδιο ο αισθητήρας εκτελεί στροφή 40-45ο ενώ αν ενεργοποιηθεί κάποιος από τους διακόπτες στρίβει δεξιά/ αριστερά ανάλογα με το ποιος διακόπτης θα ενεργοποιηθεί λόγω του εμποδίου.

12
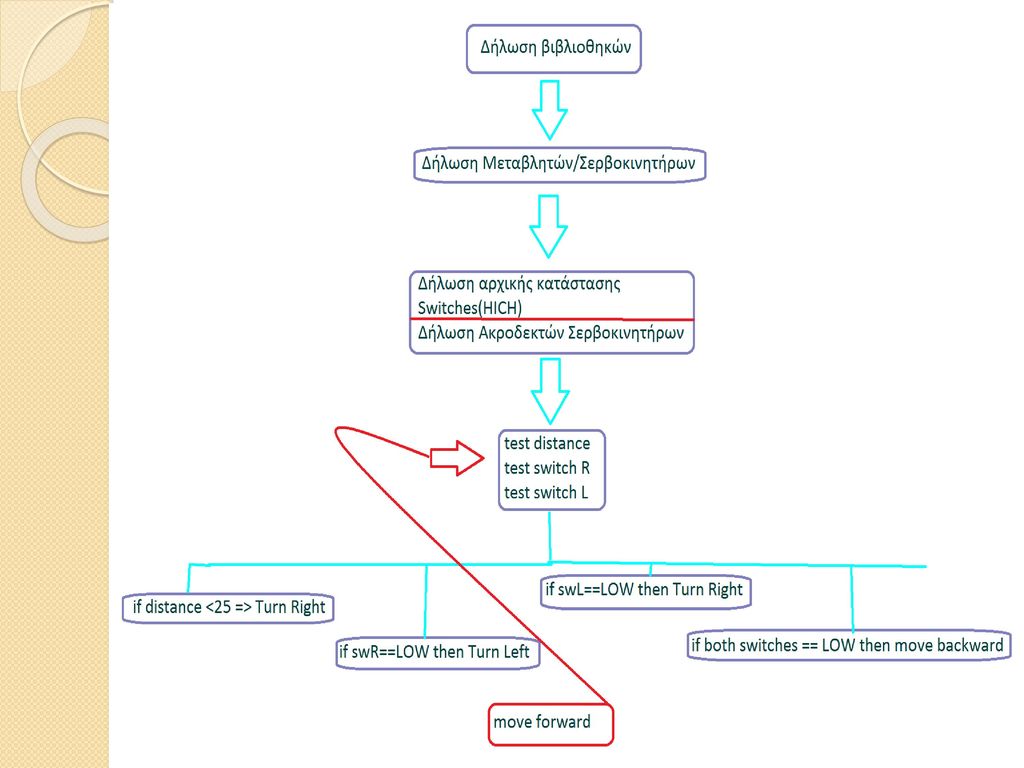
Η λειτουργία του κώδικα
Κώδικας που μας δείχνει την βασική λειτουργία του οχήματος: if (distance <=25 && swR == HIGH && swL == HIGH){ turnRight(); //Κλήση συνάρτησης delay(1000); //Καθυστέρηση για να στρίψει σωστά } Συναρτήσεις που δημιουργήθηκαν: Move forward Move backward TurnRight TurnLeft
{ turnRight(); //Κλήση συνάρτησης. delay(1000); //Καθυστέρηση για να στρίψει σωστά. } Συναρτήσεις που δημιουργήθηκαν: Move forward. Move backward. TurnRight. TurnLeft.")
14
Σχόλια-Μελλοντικές αναβαθμίσεις
Αντιμετώπιση προβλημάτων της κατασκευής Απόκτηση περαιτέρω γνώσεων Δυνατότητα επέκτασης της κατασκευής

15
Ευχαριστώ πολύ για τον χρόνο σας…
Απορίες. .

Παρόμοιες παρουσιάσεις


 & ~ B α= ~ p. (B ↔ p v q) & ~ B.>")
 Εργαστήριο Αυτομάτου Ελέγχου μΥ και Ψηφιακός Έλεγχος.>")
 Επιβλέπουσα Καθηγήτρια:>")







 Μπακατάρη Ιωάννη (1660)>")






