Τμήμα Εφαρμοσμένης Πληροφορικής και Πολυμέσων ΤΕΙ Ηρακλείου Καθηγητής: Ιωάννης Μαυρικάκης
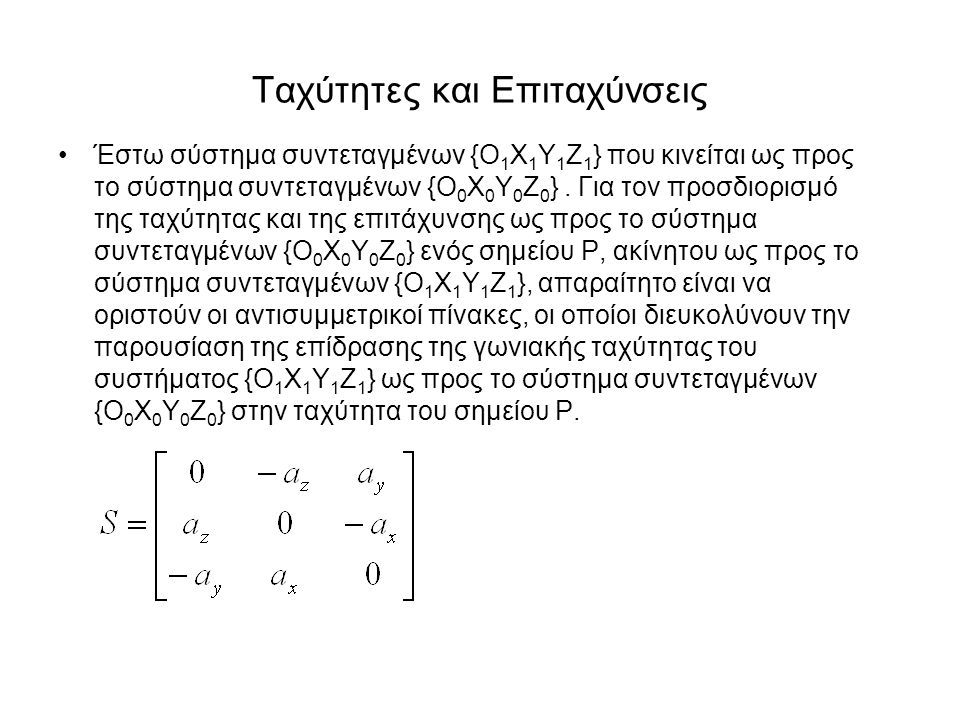
Ταχύτητες και Επιταχύνσεις Έστω σύστημα συντεταγμένων {Ο 1 Χ 1 Υ 1 Ζ 1 } που κινείται ως προς το σύστημα συντεταγμένων {Ο 0 Χ 0 Υ 0 Ζ 0 }. Για τον προσδιορισμό της ταχύτητας και της επιτάχυνσης ως προς το σύστημα συντεταγμένων {Ο 0 Χ 0 Υ 0 Ζ 0 } ενός σημείου P, ακίνητου ως προς το σύστημα συντεταγμένων {Ο 1 Χ 1 Υ 1 Ζ 1 }, απαραίτητο είναι να οριστούν οι αντισυμμετρικοί πίνακες, οι οποίοι διευκολύνουν την παρουσίαση της επίδρασης της γωνιακής ταχύτητας του συστήματος {Ο 1 Χ 1 Υ 1 Ζ 1 } ως προς το σύστημα συντεταγμένων {Ο 0 Χ 0 Υ 0 Ζ 0 } στην ταχύτητα του σημείου P.
Η ταχύτητα του σημείου P Έστω Το διάνυσμα ονομάζεται ταχύτητα μετατόπισης του συστήματος συντεταγμένων {Ο 1 Χ 1 Υ 1 Ζ 1 } ως προς το σύστημα συντεταγμένων {Ο 0 Χ 0 Υ 0 Ζ 0 }. Έστω ακόμη ο πίνακας p’ 0 =ω x p 1 + v p’’ 0 = ω’ x p 1 + ω x (ω x p 1 ) + α
Σύνθεση Ταχυτήτων Έστω ένα σύστημα συντεταγμένων {o 1 x 1 y 1 z 1 } το οποίο κινείται ως προς το σύστημα συντεταγμένων {o 0 x 0 y 0 z 0 } με γωνιακή ταχύτητα και ταχύτητα μετατόπισης Έστω επιπλέον ένα σύστημα συντεταγμένων {o 2 x 2 y 2 z 2 } το οποίο κινείται ως προς το σύστημα συντεταγμένων {o 1 x 1 y 1 z 1 } με γωνιακή ταχύτητα και ταχύτητα μετατόπισης Η κίνηση του συστήματος συντεταγμένων {o 2 x 2 y 2 z 2 } ως προς το σύστημα συντεταγμένων {o 0 x 0 y 0 z 0 } χαρακτηρίζεται από τη γωνιακή ταχύτητα και την ταχύτητα μετατόπισης Οι συντεταγμένες των σύνθετων ταχυτήτων συνδέονται με τις συντεταγμένες των επιμέρους ταχυτήτων με τις σχέσεις
Σύνθεση Γωνιακών Ταχυτήτων
Σύνθεση ταχυτήτων για n συστήματα συντεταγμένων
Άσκηση για γωνιακή ταχύτητα και ταχύτητα μετατόπισης Θεωρήστε το ρομποτικό βραχίονα. Να υπολογισθεί η γωνιακή ταχύτητα και η ταχύτητα μετατόπισης του εργαλείου τελικής δράσης του ρομποτικού βραχίονα και η ταχύτητα και η επιτάχυνση του σημείου ένωσης των δακτύλων της αρπαγής, ως προς το σύστημα συντεταγμένων {OX 0 Y 0 Z 0 } θεωρώντας ότι η γωνία φ, η πρώτη παράγωγος της φ’ και η δεύτερη παράγωγος της φ’’ είναι γνωστές.