Κατέβασμα παρουσίασης
1
Μηχανικές αρχές και η εφαρμογή τους στην Ενόργανη Γυμναστική PP #6

2
Υπολογισμός Γωνιών

3
(1.2, 1.5) (1.3, 1.2) (1.7, 1.0) (2.0, 1.5) (0, 0) 11 22 33 44
 (1.3, 1.2) (1.7, 1.0) (2.0, 1.5) (0, 0) 11 22 33 44")
4
11 22 33 44

5
(1.312, -.193) (1.156,.200) (1.147,.646) H A Frame 20 thigh shank (0, 0)
 (1.156,.200) (1.147,.646) H A Frame 20 thigh shank (0, 0)")
6
(1.312, -.193) (1.156,.200) (1.147,.646) H A thigh shank
 (1.156,.200) (1.147,.646) H A thigh shank")
7
(1.023, -.060) (.665,.242) (.716,.641) H A Frame 30 thigh shank (0, 0)
 (.665,.242) (.716,.641) H A Frame 30 thigh shank (0, 0)")
8
(1.023, -.060) (.665,.242) (.716,.641) H A Frame 30 thigh shan k
 (.665,.242) (.716,.641) H A Frame 30 thigh shan k")
9
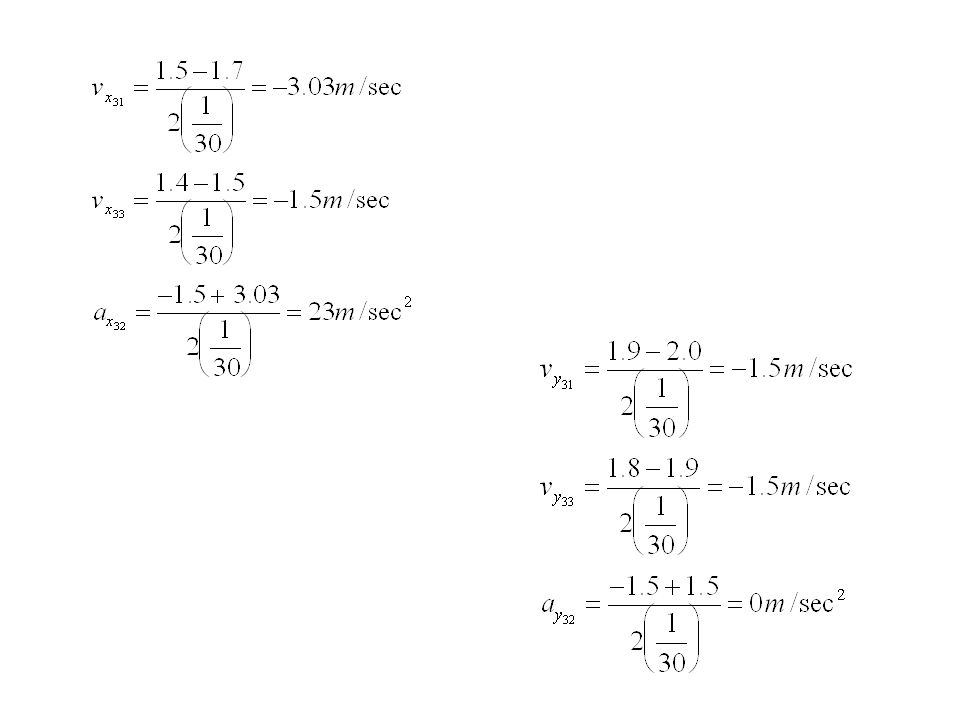
Υπολογισμοί Γραμμικής v και a

10
r123456...nr123456...n v. 2 3 4 5 6. n-1 a. 3 4 5 6. n-2

12
Υπολογισμοί Γωνιακής and

13
(0, 0) 1 33 5 Frame 1 Frame 3 Frame 5 (x 1, y 1 ) (x 3, y 3 ) (x 5, y 5 ) Frame 2 Frame 4
 1 33 5 Frame 1 Frame 3 Frame 5 (x 1, y 1 ) (x 3, y 3 ) (x 5, y 5 ) Frame 2 Frame 4")
14
(1.7, 1.3) (1.7, 1.2) (1.7, 2.0) ( 1.5, 1.9 ) (1.4, 1.8) Frame 30 Frame 32/33 Frame 34 3232
 (1.7, 1.2) (1.7, 2.0) ( 1.5, 1.9 ) (1.4, 1.8) Frame 30 Frame 32/33 Frame 34 3232 ")
15
(1.7, 2.0) (1.5, 1.9) (1.4, 1.8) (1.7, 1.2) (1.7, 1.3) 30 34 3232
 (1.5, 1.9) (1.4, 1.8) (1.7, 1.2) (1.7, 1.3) 30 34 3232")
16
S E ii

17
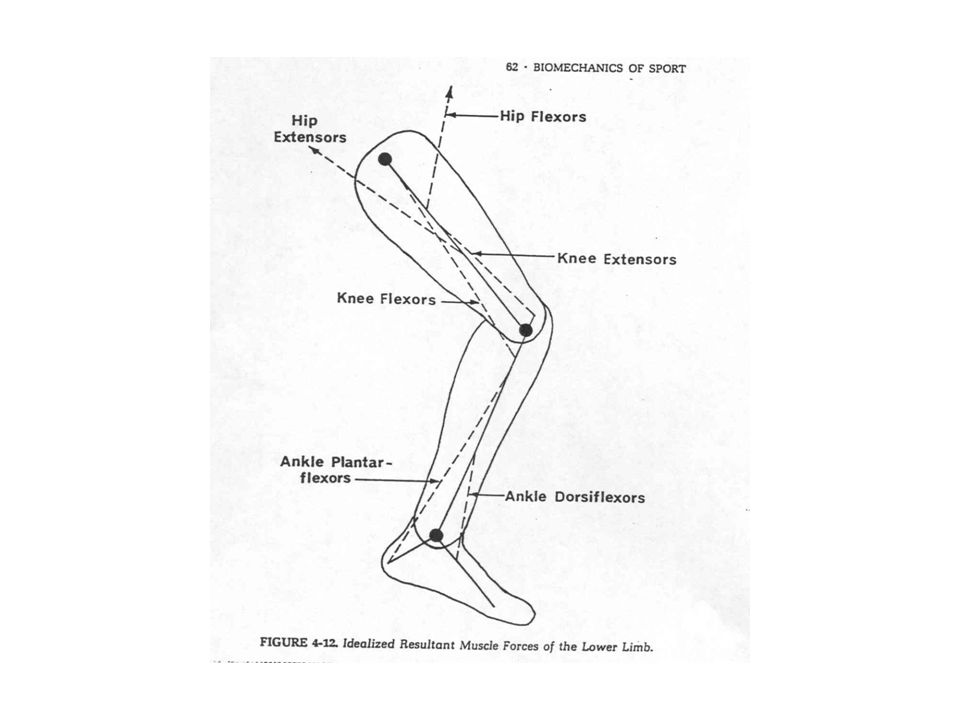
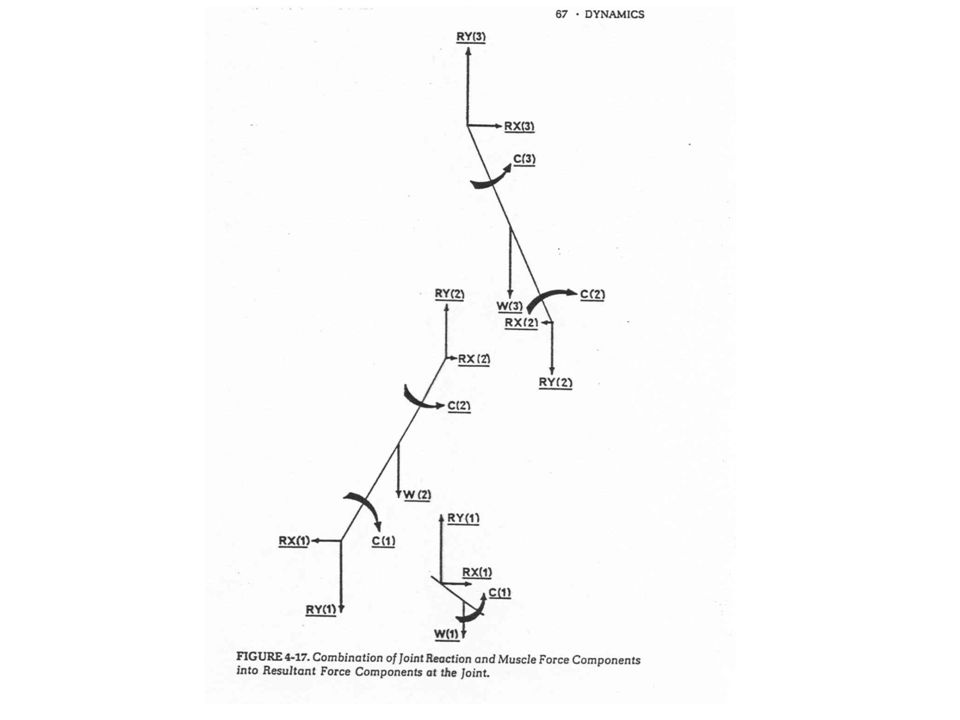
Inverse Dynamics








 ιδρύθηκε το 1923, είναι Νομικό Πρόσωπο Δημοσίου Δικαίου με αιρετή Διοίκηση. Κατά τους κανόνες.>")

 Περιεχόμενο και καινοτόμα στοιχεία του νέου Προγράμματος Σπουδών Λογοτεχνίας στην υποχρεωτική Εκπαίδευση.>")

>")







 Φύση/Έδαφος (γη) Κεφάλαιο (χρήμα) Επιχειρηματικότητα (ιδέα, διοίκηση)>")

