Κατέβασμα παρουσίασης
1
Τα στοιχειώδη περί γεωδαιτικών υπολογισμών
Οι θέσεις των γεωδαιτικών σημείων αναφοράς προσδιορίζονται σε ορθογώνιες συντεταγμένες Y, X στο υπάρχον σύστημα (= το πλαίσιο αναφοράς ). Για το επίπεδο αναφοράς οι υπολογισμοί και άλλα ζητήματα απλουστεύονται! Τα Γεωδαιτικά συστήματα των συντεταγμένων έχουν δεξιόστροφη φορά Οι επίγειες μετρήσεις στη Γεωδαισία αφορούν πάντα στη «λογική» ενός πολικού συστήματος δηλαδή γωνία και απόσταση ( = πολλά τοπικά συστήματα για κάθε σημείο Χ, Υ αναφοράς )
. Για το επίπεδο αναφοράς οι υπολογισμοί και άλλα ζητήματα απλουστεύονται! Τα Γεωδαιτικά συστήματα των συντεταγμένων έχουν δεξιόστροφη φορά. Οι επίγειες μετρήσεις στη Γεωδαισία αφορούν πάντα στη «λογική» ενός πολικού συστήματος δηλαδή γωνία και απόσταση ( = πολλά τοπικά συστήματα για κάθε σημείο Χ, Υ αναφοράς )")
2
Ο σκοπός της όδευσης ( ως μεθόδου πύκνωσης ) είναι η πύκνωση σημείων με γνωστές θέσεις Χ, Υ στο ίδιο πλαίσιο αναφοράς Γνωστές θέσεις σημείων Χ, Υ στο ίδιο σύστημα δίνουν δυνατότητα πολλών Γεωδαιτικών εργασιών Το σχήμα μιας όδευσης επιλέγεται να εξυπηρετεί συγκεκριμένες ανάγκες ΑΛΛΑ μπορεί να υπάρχουν περιορισμοί που οφείλονται σε διάφορες συνθήκες ( ποια σημεία είναι γνωστά, μορφολογία που υπάρχει στη περιοχή, ορατότητες, γεωμετρικές συνθήκες ) Η όδευση περιλαμβάνει εγκατάσταση, μέτρηση, έλεγχο ακρίβειας μετρήσεων, υπολογισμό των συντεταγμένων των σημείων της Ο υπολογισμός περιλαμβάνει αρχικά τη διόρθωση μετρήσεων δηλ. των γωνιών και πλευρών της όδευσης. Γίνεται με προγράμματα και με εμπειρικό τρόπο (η σειρά υπολογισμών και ελέγχων είναι ίδια) Η όδευση μπορεί να συνδέει και υψομετρικές συντεταγμένες
 Η όδευση περιλαμβάνει εγκατάσταση, μέτρηση, έλεγχο ακρίβειας μετρήσεων, υπολογισμό των συντεταγμένων των σημείων της. Ο υπολογισμός περιλαμβάνει αρχικά τη διόρθωση μετρήσεων δηλ. των γωνιών και πλευρών της όδευσης. Γίνεται με προγράμματα και με εμπειρικό τρόπο (η σειρά υπολογισμών και ελέγχων είναι ίδια) Η όδευση μπορεί να συνδέει και υψομετρικές συντεταγμένες.")
3
x12 = x2 – x1 y12 = y2 – y1 x21 = x1 – x2 y21 = y1 – y2 s12 = s21
Διαφορές συντεταγμένων x12 = x2 – x1 y12 = y2 – y1 x21 = x1 – x2 y21 = y1 – y2 Απόσταση s12 = s21 s12 = y12 /sin 12 s12 = x12 /cos 12

4
Γωνία διεύθυνσης 21 = 12 + 180 21 = 12 + 200 gon = 12 + 200g
Προσανατολισμένη γωνία μεταξύ μιας καθορισμένης διεύθυνσης ( π. χ παράλληλη στον ένα άξονα του συστήματος συντεταγμένων και της ευθείας που συνδέει δύο σημεία 1 και 2 21 = 21 = gon = g

5
Βοήθημα αντίληψης της γωνίας διεύθυνσης ( υπενθύμιση ορισμού )
")
6
Προσδιορισμός θέσης σημείου από τις πολικές του συντεταγμένες ( πολική γωνία ( διεύθυνσης) και απόσταση )- Παράδειγμα Δεδομένα: Καρτεσιανές συντεταγμένες των P1 [y1, x1] και P2 [y2, x2], Απόσταση d13 ( π.χ πλευρά ) Οριζόντια γωνία 1 Στόχος υπολογισμού : P3 [y3, x3]
 Οριζόντια γωνία 1. Στόχος υπολογισμού : P3 [y3, x3]")
7
13 = 12 + 1 γωνία διεύθυνσης
Σύμφωνα με τον ορισμό 12 13 = 12 + 1 γωνία διεύθυνσης Διαφορές συντεταγμένων: y13 = d13 . sin 13 x13 = d13 . cos 13 y3 = y1 + y13 = y1 + d13 . sin 13 x3 = x1 + x13 = x1 + d13 . cos 13 ( πρόκειται για απλή επίλυση ορθογώνιου τριγώνου από μετρήσεις )
")
8
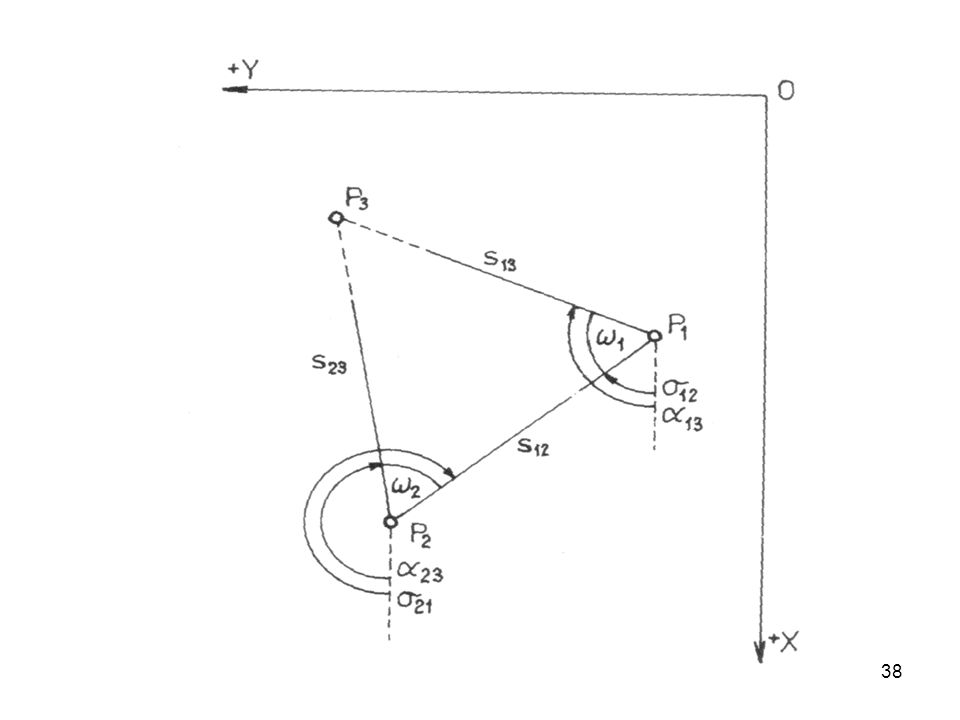
Υπολογισμός συντεταγμένων Χ, Υ ως σημείου τομής δύο διευθύνσεων στις γωνίες βάσης νοητού τριγώνου
Δεδομένα: Καρτεσιανές συντ/νες των σημείων P1 [y1, x1] & P2 [y2, x2], Οριζόντιες γωνίες 1 και 2 Στόχος υπολογισμού: P3 [y3, x3] ( η «λογική» εμπροσθοτομίας» )
")
9
21 = 12 + 200 βαθμοί Σύμφωνα με τον προσανατολισμό η διεύθυνση 12
21 = βαθμοί s13 = s12 . sin 2 / sin (200 g – (1 - 2)) = s12 . sin 2 / sin (1 + 2) , s23 = s12 . sin 1 / sin (200 g – (1 - 2)) = s12 . sin 1 / sin (1 + 2) ( νόμος ημιτόνων)
) = s12 . sin 2 / sin (1 + 2) , s23 = s12 . sin 1 / sin (200 g – (1 - 2)) = s12 . sin 1 / sin (1 + 2) ( νόμος ημιτόνων)")
10
13 = 12 + 1 23 = 21 – 2 y3 = y1 + s13 . sin 13 = y2 + s23 . sin 23 x3 = x1 + s13 . cos 13 = x2 + s23 . cos 23 Επισήμανση: Οι συντεταγμένες του σημείου P3 προσδιορίζονται και από τις δύο κορυφές της βάσης του τριγώνου ( 2 φορές ) από τις γωνίες διεύθυνσης και τις αποστάσεις ( για έλεγχο ). Οι συντεταγμένες του Ρ3 είναι η μέση τιμή που προκύπτει από τους δύο υπολογισμούς ( πλεόνασμα μετρήσεων & έλεγχοι βασικά στοιχεία πρακτικής )
 από τις γωνίες διεύθυνσης και τις αποστάσεις ( για έλεγχο ). Οι συντεταγμένες του Ρ3 είναι η μέση τιμή που προκύπτει από τους δύο υπολογισμούς. ( πλεόνασμα μετρήσεων & έλεγχοι βασικά στοιχεία πρακτικής )")
11
Όδευση (πολύγωνο) Ορισμός: Μια τεθλασμένη γραμμή που συνδέει δύο τοπογραφικά σημεία ( Χ, Υ υλοποιημένα στο έδαφος ) Σημεία όδευσης = οι κορυφές της τεθλασμένης γραμμής! Πλευρές = τα τμήματα μεταξύ δύο κορυφών Οι οριζόντιες γωνίες σε όλα τα σημεία της όδευσης και όλες οι πλευρές μετρώνται Υπολογίζονται οι συντεταγμένες Y, X των σημείων της όδευσης ( ο τελικός στόχος! )
")
12
Ονοματολογία & ερμηνεία όρων
Εξαρτημένη (στο ένα ή και τα δύο άκρα ) – Η όδευση συνδέει τοπογραφικά ( γεωδαιτικά ) σημεία των οποίων είναι γνωστές οι συντεταγμένες Χ, Υ σε ένα γεωδαιτικό πλαίσιο αναφοράς ( ένα γεωδαιτικό datum ) Ανεξάρτητη Η όδευση συνδέει τοπογραφικά σημεία των οποίων ΔΕΝ είναι γνωστές οι συντεταγμένες Χ, Υ Ανάλογα με το σχήμα της τεθλασμένης: Ανοικτή όδευση Κλειστή – ΄το αρχικό σημείο = τελικό σημείο Προσανατολισμός όδευσης = μέτρηση της οριζόντιας γωνίας στην αρχική ( ή / και τη τελική ) κορυφή της.
 – Η όδευση συνδέει τοπογραφικά ( γεωδαιτικά ) σημεία των οποίων είναι γνωστές οι συντεταγμένες Χ, Υ σε ένα γεωδαιτικό πλαίσιο αναφοράς ( ένα γεωδαιτικό datum ) Ανεξάρτητη. Η όδευση συνδέει τοπογραφικά σημεία των οποίων ΔΕΝ είναι γνωστές οι συντεταγμένες Χ, Υ. Ανάλογα με το σχήμα της τεθλασμένης: Ανοικτή όδευση. Κλειστή – ΄το αρχικό σημείο = τελικό σημείο. Προσανατολισμός όδευσης = μέτρηση της οριζόντιας γωνίας στην αρχική ( ή / και τη τελική ) κορυφή της.")
13
Μια πλήρως εξαρτημένη όδευση στα δύο άκρα

14
Δεδομένα: Συντεταγμένες Χ, Υ του αρχικού και τελικού σημείων 1 [y1, x1], n [yn, xn] (στο παράδειγμα n = 5) Οι συντεταγμένες των σημείων προσανατολισμού A [yA, xA], B [yB, xB] Μετρήσεις οριζόντιων αποστάσεων d12, d23, d34, d45 Μετρήσεις οριζοντίων γωνιών ω1, ω2, ω3, ω4, ω5 Στόχος υπολογισμών: Οι συντεταγμένες Χ, Υ των σημείων 2 [y2, x2], 3 [y3, x3], …, n-1 [yn-1, xn-1]
![Δεδομένα: Συντεταγμένες Χ, Υ του αρχικού και τελικού σημείων. 1 [y1, x1], n [yn, xn] (στο παράδειγμα n = 5)](http://slideplayer.gr/slide/2011241/8/images/14/%CE%94%CE%B5%CE%B4%CE%BF%CE%BC%CE%AD%CE%BD%CE%B1%3A+%CE%A3%CF%85%CE%BD%CF%84%CE%B5%CF%84%CE%B1%CE%B3%CE%BC%CE%AD%CE%BD%CE%B5%CF%82+%CE%A7%2C+%CE%A5+%CF%84%CE%BF%CF%85+%CE%B1%CF%81%CF%87%CE%B9%CE%BA%CE%BF%CF%8D+%CE%BA%CE%B1%CE%B9+%CF%84%CE%B5%CE%BB%CE%B9%CE%BA%CE%BF%CF%8D+%CF%83%CE%B7%CE%BC%CE%B5%CE%AF%CF%89%CE%BD.+1+%5By1%2C+x1%5D%2C+n+%5Byn%2C+xn%5D+%28%CF%83%CF%84%CE%BF+%CF%80%CE%B1%CF%81%CE%AC%CE%B4%CE%B5%CE%B9%CE%B3%CE%BC%CE%B1+n+%3D+5%29.jpg "Οι συντεταγμένες των σημείων προσανατολισμού. A [yA, xA], B [yB, xB] Μετρήσεις οριζόντιων αποστάσεων d12, d23, d34, d45. Μετρήσεις οριζοντίων γωνιών ω1, ω2, ω3, ω4, ω5. Στόχος υπολογισμών: Οι συντεταγμένες Χ, Υ των σημείων 2 [y2, x2], 3 [y3, x3], …, n-1 [yn-1, xn-1]")
15
Βασικοί υπολογισμοί = για την εύρεση γωνιών διεύθυνσης αρχής & τέλους
Προσοχή: Εύρεση σωστού τεταρτημόριου για γωνίες διεύθυνσης !!!!

16
2. Γωνιακή διόρθωση Το συνολικό γωνιακό σφάλμα υπολογίζεται ως διαφορά του «έπρεπε να είναι» - «βρέθηκε ότι είναι» «Έπρεπε να είναι»= η γωνία διεύθυνσης που υπολογίστηκε στο τέλος της όδευσης «βρέθηκε ότι είναι»= η γωνία διεύθυνσης στο τέλος της όδευσης από τις μετρήσεις των οριζοντίων γωνιών. i = 1, … , n n … ο αριθμός των κορυφών της όδευσης (στο παράδειγμα n = 5)
")
17
Έλεγχος του μεγέθους του γωνιακού σφάλματος ( ανάλογα με τις προδιαγραφές που υπάρχουν)
Η πρώτη σχέση είναι το κριτήριο ελέγχου ( από προδιαγραφές )και η δεύτερη εκφράζει ένα εμπειρικό τύπο στον οποίο η ποσότητα έξω από τη ρίζα ( 0.01) εκφράζει την ακρίβεια του θεοδολίχου που χρησιμοποιείται Το συνολικό γωνιακό σφάλμα μοιράζεται εξ ίσου στις μετρημένες οριζόντιες γωνίες: = O / n ´1 = 1 + , ... , ´n = n + .
και η δεύτερη εκφράζει ένα εμπειρικό τύπο στον οποίο η ποσότητα έξω από τη ρίζα ( 0.01) εκφράζει την ακρίβεια του θεοδολίχου που χρησιμοποιείται. Το συνολικό γωνιακό σφάλμα μοιράζεται εξ ίσου στις μετρημένες οριζόντιες γωνίες: = O / n. ´1 = 1 + , ... , ´n = n + .")
18
3. Από τις διορθωμένες γωνίες υπολογίζονται «διορθωμένες» γωνίες δειύθυνσης
12 = 1A + ´1 23 = 12 + ´2 ± 200g … n-1,n = n-2,n-1 + ´n-1 ± 200g nB = n-1,n + ´n ± 200g = nB Έλεγχος η nB να είναι ίση με την αρχικά γνωστή !

19
4. Υπολογισμός των διαφορών των συντεταγμένων μεταξύ διαδοχικών σημείων ( ΔΧ, ΔΥ )
y12 = d12 . sin 12 … yn-1,n = dn-1,n . sin n-1,n x12 = d12 . cos 12 xn-1,n = dn-1,n . cos n-1,n

20
y1n = y12 + y23+ y34 + y4n = y
5. Υπολογισμός της συνολικής απόκλισης τιμών συντεταγμένων σε Υ και Χ ( μεταξύ αρχικής και τελικής κορυφής ) y1n = yn – y1 x1n = xn – x1 y1n = y12 + y23+ y34 + y4n = y x1n = x12 + x23+ x34 + x4n = x Σχηματισμός διαφορών «έπρεπε να είναι» - «βρέθηκε ότι είναι» Oy = y1n – y Ox = x1n – x
 y1n = yn – y1. x1n = xn – x1. y1n = y12 + y23+ y34 + y4n = y. x1n = x12 + x23+ x34 + x4n = x. Σχηματισμός διαφορών «έπρεπε να είναι» - «βρέθηκε ότι είναι» Oy = y1n – y. Ox = x1n – x.")
21
Διαφορά θέσης τελικού σημείου
Συνολική «γραμμική» μετατόπιση ( γραμμικό σφάλμα ) Έλεγχος της διαφοράς θέσης ΟΡ αν εμπίπτει στις προδιαγραφές:
 Έλεγχος της διαφοράς θέσης ΟΡ αν εμπίπτει στις προδιαγραφές:")
22
Διορθώσεις στις επί μέρους διαφορές συντεταγμένων από μοίρασμα του συνολικού γραμμικού σφάλματος
Αυτές οι γραμμικές διορθώσεις δεν είναι ισόποσες αλλά ανάλογες με τις τιμές των διαφορών των συντεταγμένων!

23
6. Διορθωμένες διαφορές συντεταγμένων
… Έλεγχος!

24
7. Τελικός υπολογισμός διορθωμένων συντεταγμένων
y1 = δεδομένη x1 = δεδομένη y2 = y1 + y´ x2 = x1 + x´12 …. yn = yn y´n – 1, n = η τελική δεδομένη Έλεγχος! xn = xn x´n – 1, n = η τελική δεδομένη Έλεγχος!

25
Κλειστή όδευση χωρίς προσανατολισμό

26
Δίδονται: Μετρημένες αποστάσεις d12, d23, d34, d41 Μετρημένες οριζόντιες γωνίες ω1, ω2, ω3, ω4 Υπολογίζονται ( στόχος ): Οι Χ, Υ συντεταγμένες των σημείων P1 [y1, x1], P2 [y2, x2], P3 [y3, x3], P4 [y4, x4] Είναι φανερό ότι η κλειστή όδευση δίνει γωνιακό κριτήριο ελέγχου λόγω γεωμετρίας ( στο επίπεδο )
")
27
1. Επιλογή ενός τοπικού συστήματος συντεταγμένων ( επιφάνεια αναφοράς το επίπεδο )
Ένα σημείο της όδευσης επιλέγεται ως αρχή τοπικού συστήματος (εδώ π. χ το P1) και ο ένας από τους δύο άξονες του τοπικού συστήματος επιλέγεται να ταυτισθεί με την πλευρά που ορίζει αυτό το σημείο ως μια άκρη (εδώ είναι ο άξονας +Y = η πλευρά P1P2). Οι συμβατικές τιμές Χ, Υ του σημείου P1 επιλέγονται ( συνήθως 0΄, 0 ή άλλος ακέραιος: y1 = 0,00, x1 = 0,00 Άρα θα είναι από αυτή την σύμβαση: x2 = 0,00, 12 = 100g
 και ο ένας από τους δύο άξονες του τοπικού συστήματος επιλέγεται να ταυτισθεί με την πλευρά που ορίζει αυτό το σημείο ως μια άκρη (εδώ είναι ο άξονας +Y = η πλευρά P1P2). Οι συμβατικές τιμές Χ, Υ του σημείου P1 επιλέγονται ( συνήθως 0΄, 0 ή άλλος ακέραιος: y1 = 0,00, x1 = 0,00. Άρα θα είναι από αυτή την σύμβαση: x2 = 0,00, 12 = 100g.")
28
2. Γωνιακό σφάλμα ( από τη γεωμετρική συνθήκη κλειστού σχήματος)
Η σειρά των υπολογισμών είναι ίδια όπως στην ανοικτή όδευση με τις ανάλογες απλοποιήσεις ( = εδώ έχουμε ταύτιση αρχικού και τελικού σημείου. 2. Γωνιακό σφάλμα ( από τη γεωμετρική συνθήκη κλειστού σχήματος) i = 1, … , n n … αριθμός κορυφών (στο παράδειγμα n = 4)
 i = 1, … , n. n … αριθμός κορυφών (στο παράδειγμα n = 4)")
29
Κατά τα γνωστά ισομερισμός γωνιακού σφάλματος στις μετρημένες γωνίες:
Κριτήριο προδιαγραφών για γωνιακή διόρθωση: Κατά τα γνωστά ισομερισμός γωνιακού σφάλματος στις μετρημένες γωνίες: = O / n ´1 = 1 + , ... , ´n = n + .

30
12 = 12 = 100g 23 = 12 + ´2 ± 200g … 41 = 34 + ´4 ± 200g
3. Υπολογισμός γωνιών διεύθυνσης πλευρών 12 = 12 = 100g 23 = 12 + ´2 ± 200g … 41 = 34 + ´4 ± 200g 12 = 41 + ´1 ± 200g = 12 Αντικειμενικός έλεγχος!

31
4. Υπολογισμός επί μέρους διαφορών ΔΧ, ΔΥ
y12 = d12 . sin 12 … y41 = d41 . sin 41 x12 = d12 . cos 12 x41 = d41 . cos 41

32
5. Απόκλιση Χ, Υ στο τελικό σημείο
y1n = yn – y1 = 0 x1n = xn – x1 = 0 y1ncal = y12 + y23+ y34 + y4n = y x1ncal = x12 + x23+ x34 + x4n = x Oy = – y Ox = – x

33
Διαφορά θέσης ( γραμμικό σφάλμα )
Έλεγχος προδιαγραφών για διόρθωση:

34
Διορθώσεις διαφορών ΔΧ, ΔΥ από το γραμμικό σφάλμα

35
6. διορθωμένες διαφορές ΔΧ,ΔΥ
…. Κριτήριο ελέγχου!

36
7. Στάδιο υπολογισμού διορθωμένων συντεταγμένων
y1 = γνωστή x1 = γνωστή y2 = y1 + y´ x2 = x1 + x´12 …. y1 = y4 + y´41 = γνωστή Έλεγχος! x1 = x4 + x´41 = γνωστή Έλεγχος!

37
Εμπροσθοτομία από αποστάσεις
Δίνονται: Καρτεσιανές συντεταγμένες των P1 [y1, x1] και P2 [y2, x2], Μετρημένες οριζόντιες αποστάσεις d13 και d23 Υπολογίζονται: ορθογώνιες συντεταγμένες του P3 [y3, x3]

39
Οπισθοτομία ( μόνο ως παράδειγμα )
Δίνονται: Ορθογώνιες συντεταγμένες των σημείων P1 [y1, x1], P2 [y2, x2], P3 [y3, x3] Μετρημένες οριζόντιες γωνίες 1 & 2 Υπολογίζονται: ορθογώνιες συντεταγμένες του P4 [y4, x4] Στο επόμενο σχήμα δίνεται η γεωμετρία που ισχύει!!!!!


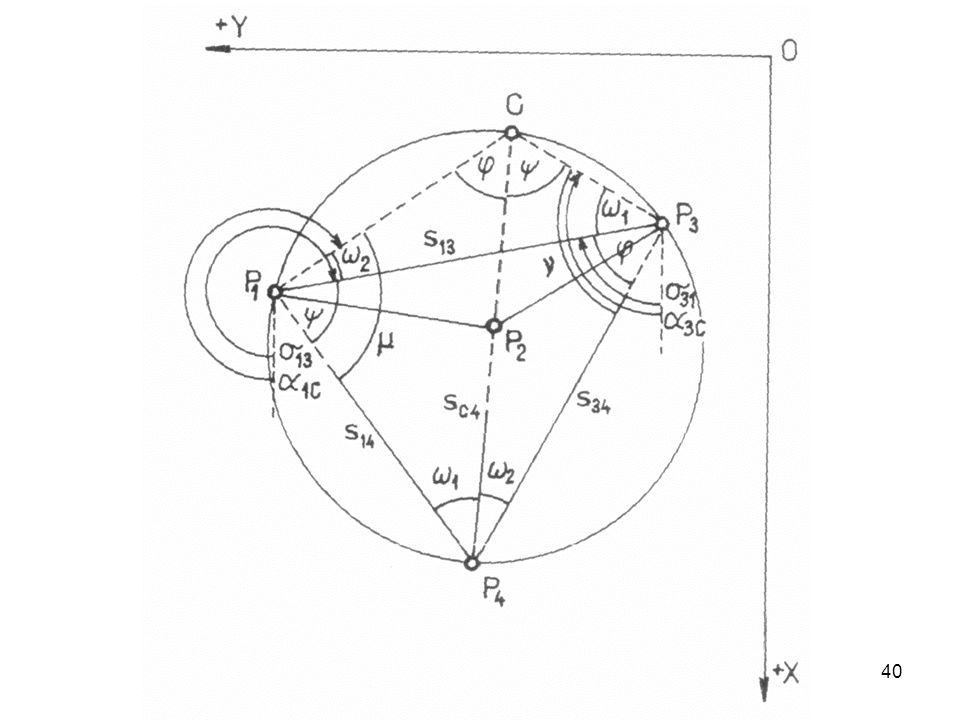
>")



>")











 Στοιχεία μεθόδων χάραξης 4ο Εξάμηνο Σχολής Πολ. Μηχ. ΕΜΠ Αφορά σε απλές επίγειες μεθόδους της Τοπογραφίας.>")


