Κατέβασμα παρουσίασης
Η παρουσίαση φορτώνεται. Παρακαλείστε να περιμένετε

1
ΡΟΜΠΟΤΙΚΗ ΡΟΜΠΟΤΙΚΟΙ ΒΡΑΧΙΟΝΕΣ

2
Περιεχόμενα μαθήματος

3
Ένα βιομηχανικό ρομπότ αποτελείται από:
Τον ρομποτικό βραχίονα ή χειριστή: a sequence of rigid bodies (links) connected by means of articulation (joints). It is characterized by an arm (for mobility), a wrist (for dexterity) and an end effector (to perform a task). Τους Ενεργοποιητές (Actuators): set the manipulator in motion by actuating the joints (electric, hydraulic or pneumatic) Τους Αισθητήρες (Sensors): measure the manipulators status (proprioceptive sensors) or the status of the environment (exteroceptive sensors). Το σύστημα ελέγχου (control system) : controls and supervises manipulator motion.
 connected by means of articulation (joints). It is characterized by an arm (for mobility), a wrist (for dexterity) and an end effector (to perform a task). Τους Ενεργοποιητές (Actuators): set the manipulator in motion by actuating the joints (electric, hydraulic or pneumatic) Τους Αισθητήρες (Sensors): measure the manipulators status (proprioceptive sensors) or the status of the environment (exteroceptive sensors). Το σύστημα ελέγχου (control system) : controls and supervises manipulator motion.")
7
Ορισμοί εργαλείο (end effector) αρθρώσεις σύνδεσμοι
 αρθρώσεις σύνδεσμοι")
10
Ορισμοί Xώρος εργασίας (workspace) = o χώρος στον οποίο μπορεί να βρεθεί το εργαλείο (end effector) Προσιτός Xώρος εργασίας (reachable workspace) = o χώρος όπου το εργαλείο μπορεί να βρεθεί έστω με ένα προσανατολισμό Επιδέξιος Xώρος εργασίας (dextrous workspace) = o χώρος όπου το εργαλείο μπορεί να βρεθεί με όλους τους δυνατούς προσανατολισμούς
 = o χώρος όπου το εργαλείο μπορεί να βρεθεί έστω με ένα προσανατολισμό. Επιδέξιος Xώρος εργασίας (dextrous workspace) = o χώρος όπου το εργαλείο μπορεί να βρεθεί με όλους τους δυνατούς προσανατολισμούς.")
11
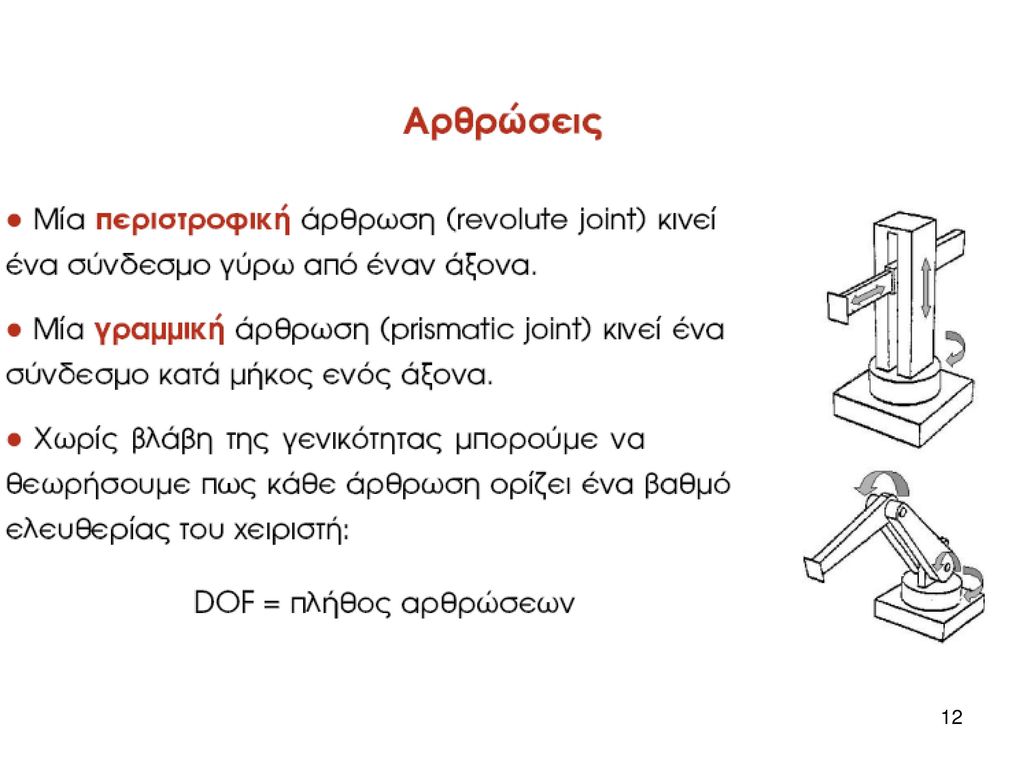
Ορισμοί Είδη αρθρώσεων Κυλινδρική άρθρωση 1 βαθμός ελευθερίας ()
Πρισματική άρθρωση 1 βαθμός ελευθερίας (d)
")
13
Παράδειγμα: PUMA 560 2 3 4 1 To PUMA 560 έχει 6 βαθμούς ελευθερίας
There are two more joints on the end effector (the gripper) 1 To PUMA 560 έχει 6 βαθμούς ελευθερίας Hand coordinate: n: normal vector; s: sliding vector; a: approach vector, normal to the tool mounting plate
 1. To PUMA 560 έχει 6 βαθμούς ελευθερίας. Hand coordinate: n: normal vector; s: sliding vector; a: approach vector, normal to the. tool mounting plate.")
14
Παράδειγμα

15
Βαθμοί ελευθερίας Συνολικά απαιτούνται 6 βαθμοί ελευθερίας
3 βαθμοί ελευθερίας 3 βαθμοί ελευθερίας Συνολικά απαιτούνται 6 βαθμοί ελευθερίας

18
Κατάταξη ρομπότ σύμφωνα με τον γεωμετρικό τους σχηματισμό
ορθογωνικά κυλινδρικά σφαιρικά

19
Κατάταξη ρομπότ σύμφωνα με τον γεωμετρικό τους σχηματισμό
SCARA αρθρωτά παράλληλα

20
Κατάταξη ρομπότ σύμφωνα με τον γεωμετρικό τους σχηματισμό
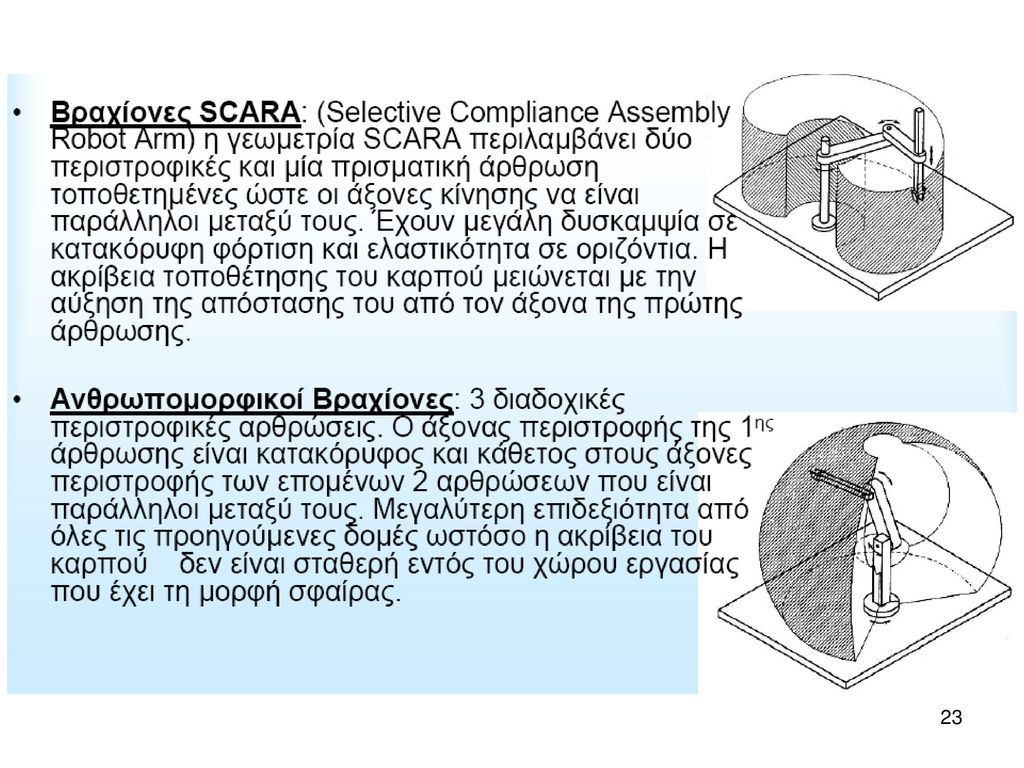
ορθογωνικά κυλινδρικά σφαιρικά SCARA: RRP (Selective Compliance Assembly Robot Arm) αρθρωτά
 αρθρωτά.")
24
Παραδείγματα Robot

25
Παραδείγματα Robot

26
Τυπικά Robot

27
Τυπικά Robot

28
Τυπικά Robot

29
Τυπικά Robot

30
Κριτήρια κινηματικής απόδοσης ρομπότ

31
Κριτήρια κινηματικής απόδοσης ρομπότ
Επαναληψιμότητα (Repeatability) : the measurement of how closely a robot returns to the same position n number of times. Ακρίβεια (Accuracy): the measurement of how closely the robot moves to a given target coordinate. Where: Pt is the target position, Pa the average achieved position, R is the repeatability, and A is the accuracy.
 : the measurement of how closely a robot returns to the same position n number of times. Ακρίβεια (Accuracy): the measurement of how closely the robot moves to a given target coordinate. Where: Pt is the target position, Pa the average achieved position, R is the repeatability, and. A is the accuracy.")
32
Κριτήρια κινηματικής απόδοσης ρομπότ

33
Κριτήρια κινηματικής απόδοσης ρομπότ

34
Κριτήρια κινηματικής απόδοσης ρομπότ

35
Κριτήρια κινηματικής απόδοσης ρομπότ

36
Κριτήρια κινηματικής απόδοσης ρομπότ

37
Κριτήρια κινηματικής απόδοσης ρομπότ

38
Κριτήρια κινηματικής απόδοσης ρομπότ
Παράγοντες που επηρεάζουν την απόδοση ενός ρομπότ: environmental factors (eg temperature, humidity and electrical noise); kinematic parameters (eg robot link lengths etc); dynamic parameters (eg structural compliance, friction); measurement factors (eg resolution and non-linearity of encoders and resolvers); computational factors (eg digital round off, steady-state control errors); and application factors (eg installation errors and errors in defining work-piece coordinate frames).
; kinematic parameters (eg robot link lengths etc); dynamic parameters (eg structural compliance, friction); measurement factors (eg resolution and non-linearity of encoders and resolvers); computational factors (eg digital round off, steady-state control errors); and. application factors (eg installation errors and errors in defining work-piece coordinate frames).")
39
Ρομποτικός χειριστής 2 βαθμών ελευθερίας

40
Ρομποτικός χειριστής 2 βαθμών ελευθερίας

41
Ρομποτικός χειριστής 2 βαθμών ελευθερίας

42
Ρομποτικός χειριστής 2 βαθμών ελευθερίας

43
Ρομποτικός χειριστής 2 βαθμών ελευθερίας

44
Ρομποτικός χειριστής 2 βαθμών ελευθερίας

45
Ρομποτικός χειριστής 2 βαθμών ελευθερίας

46
Ρομποτικός χειριστής 2 βαθμών ελευθερίας

47
Ρομποτικός χειριστής 2 βαθμών ελευθερίας

48
Ρομποτικός χειριστής 2 βαθμών ελευθερίας

49
Ρομποτικός χειριστής 2 βαθμών ελευθερίας

50
Ρομποτικός χειριστής 2 βαθμών ελευθερίας

51
Ρομποτικός χειριστής 2 βαθμών ελευθερίας

52
Ρομποτικός χειριστής 3 βαθμών ελευθερίας

53
Ρομποτικός χειριστής 3 βαθμών ελευθερίας

54
Ρομποτικός χειριστής 3 βαθμών ελευθερίας

55
Ρομποτικός χειριστής 3 βαθμών ελευθερίας

56
ΣΥΜΠΕΡΑΣΜΑ: Για χειριστές στον τρισδιάστατο χώρο των 3 διαστάσεων η ορθή και η αντίστροφη κινηματική ανάλυση δίνουν πολύπλοκες τριγωνομετρικές εξισώσεις. Για αυτό εισάγουμε τους ομογενείς μετασχηματισμούς συντεταγμένων.

57
Ερωτήσεις;

Παρόμοιες παρουσιάσεις








 Πρόγραμμα Μεταπτυχιακών Σπουδών στην Εφαρμοσμένη Πληροφορική.>")

, Performance Indicators (PIs), Key Performance Indicators (KPIs)>")










 Διασυνδέοντας θεωρητικά πλαίσια (Connectivity and networking)>")
>")



