Κατέβασμα παρουσίασης
2
Γενικός Στόχος Πρόσβαση (επισκεψιμότητα) των Εκθέσεων και Εκθεμάτων στο ευρύ Κοινό και σε ειδικούς Μελετητές
 των Εκθέσεων και Εκθεμάτων στο ευρύ Κοινό και σε ειδικούς Μελετητές")
3
Συνήθης Πρακτική Επιτόπια Επίσκεψη στο Χώρο Ενδιαφέροντος άριστος τρόπος μελέτης και απόλαυσης των εκθεμάτων

4
Νέες Τεχνολογίες - Δυνατότητες Τηλε-επίσκεψη μέσω συστημάτων Εικονικής Πραγματικότητας πλεονεκτήματα αλλά και μειονεκτήματα

5
Μια Εντελώς Νέα Προσέγγιση Τηλε-επίσκεψη μέσω Ρομποτικών Εκπροσώπων Επίσκεψη και Παρατήρηση του Πραγματικού Εκθεσιακού Χώρου Το Έργο Έρευνας και Ανάπτυξης TOURBOT

7
Παρατήρηση μέσω των ματιών του ρομπότ και εξ’αποστάσεως έλεγχος του ρομπότ Internet Τηλε-παρουσία σε εκθεσιακούς χώρους μέσω ρομποτικών εκπροσώπων Κεντρικός Στόχος

8
Απομακρυσμένος “εκπρόσωπος” του χρήστη Βασισμένος σε κινητά ρομποτικά συστήματα, εφοδιασμένα με αισθητήρες και συνδεδεμένα με το διαδίκτυο Παροχή ελέγχου πάνω από το διαδίκτυο Ικανά να πλοηγούνται αυτόνομα και με ασφάλεια Μετάδοση πολυμεσικής πληροφορίας στο χρήστη Βασικά Στοιχεία

9
Ανάπτυξη ρομπότ “ξεναγού” με δυνατότητα να παρέχει εξατομικευμένη πρόσβαση σε εκθέματα πάνω από το διαδίκτυο Λειτουργία ως ο εκπρόσωπος του χρήστη στον εκθεσιακό χώρο - κίνηση και παρατήρηση ανάλογα με τη βούληση του χρήστη Μετάδοση πολυμεσικής πληροφορίας στο χρήστη Στόχοι

10
Συγχρηματοδοτήθηκε από το Πρόγραμμα “Τεχνολογίες της Κοινωνίας Πληροφοριών” της Ευρωπαϊκής Κοινότητας Προϋπολογισμός 1.718.150 € ◊ 1,088,790 € Κοινοτική χρηματοδότηση ◊ 629.360 € χρηματοδότηση από συμμετέχοντες φορείς Διάρκεια 2 έτη (1/1/2000 - 31/12/2001) Κοινοπραξία Επτά Οργανισμών
 Κοινοπραξία Επτά Οργανισμών")
11
Κοινοπραξία Ίδρυμα Τεχνολογίας και Έρευνας (Συντονιστής Κοινοπραξίας / Τεχνολογικός Φορέας) Πανεπιστήμιο Freiburg (Τεχνολογικός Φορέας) Ίδρυμα Μείζονος Ελληνισμού (Διαμεσολαβητής Τεχνολογιών / Φορέας Χρήστης) Πανεπιστήμιο Βόννης (Τεχνολογικός Φορέας) ΘΕΩΝ Ρομποτικά Συστήματα (Τεχνολογικός Φορέας) Γερμανικό Μουσείο Βόννης (Φορέας Χρήστης) Βυζαντινό και Χριστιανικό Μουσείο Αθηνών (Φορέας Χρήστης)
 Πανεπιστήμιο Freiburg (Τεχνολογικός Φορέας) Ίδρυμα Μείζονος Ελληνισμού (Διαμεσολαβητής Τεχνολογιών / Φορέας Χρήστης) Πανεπιστήμιο Βόννης (Τεχνολογικός Φορέας) ΘΕΩΝ Ρομποτικά Συστήματα (Τεχνολογικός Φορέας) Γερμανικό Μουσείο Βόννης (Φορέας Χρήστης) Βυζαντινό και Χριστιανικό Μουσείο Αθηνών (Φορέας Χρήστης)")
12
Κινητά Ρομποτικά Συστήματα Αυτόνομη Πλοήγηση Απομακρυσμένη Πρόσβαση & Έλεγχος μέσω Διαδικτύου Διαπροσωπείες Χρήστη- Συστήματος

13
Environment Mobile Platform Navigation SW System Administrator Information and Data Base Remote User On-site User WWW Off-board Workstation Data Link Platform bus Wireless Link Internet Link Processing & Control Unit THEON Sensors FORTH UNIBONN UNIFR FHW UNIFR UNIBONN FHW UNIFR UNIBONN UNIFR MUSBON BYZMUS

14
Ολοκκλήρωση Διαπροσωπείας / Συστήματος Πλοήγησης

16
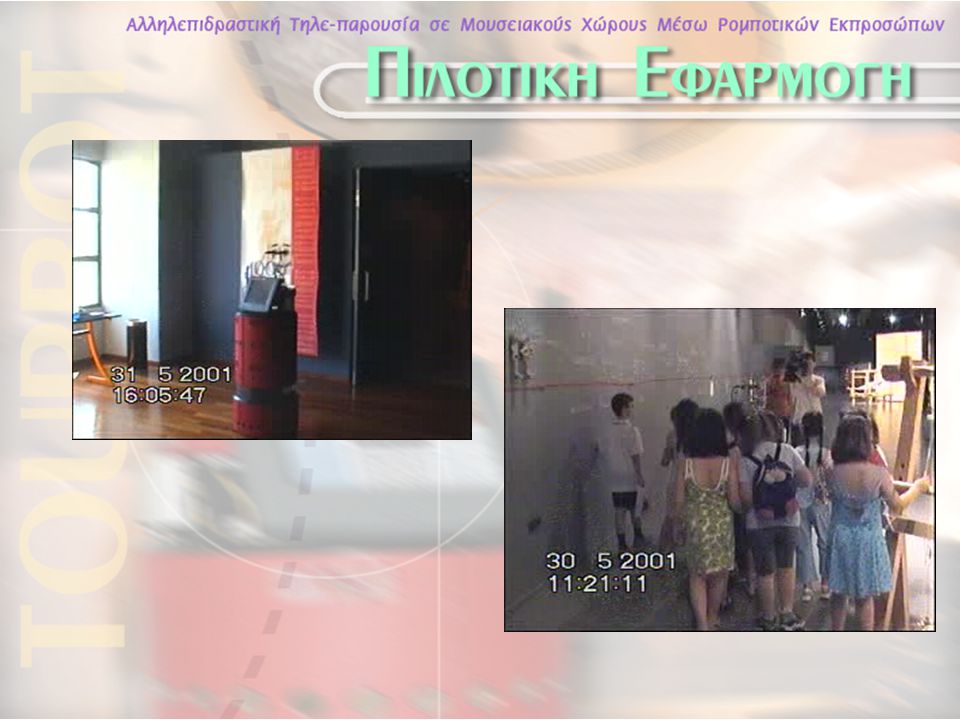
Η πρώτη Πιλοτική Εφαρμογή του TOURBOT έγινε 28/5 - 2/6, 2001 στους Εκθεσιακούς χώρους του Ιδρύματος Μείζονος Ελληνισμού Στατιστικά Στοιχεία: ~ 2000 επισκέψεις από το διαδίκτυο ~ 5-10 χρήστες ανά πάσα στιγμή Network Traffic

22
Επιδείχτηκε η δυνατότητα κινητών ρομπότ να λειτουργήσουν σε πραγματικούς εκθεσιακούς χώρους για μεγάλα χρονικά διαστήματα με πλήθος επισκεπτών ικανό αριθμό δικτυακών επισκεπτών Μελλοντικοί Στόχοι περιλαμβάνουν Λειτουργία σε μόνιμη βάση επέκταση σε άλλους χώρους με κατάλληλες παρεμβάσεις στο σύστημα επέκταση δυνατοτήτων (chat, ερωτήσεις-απαντήσεις, συνομιλία δικτυακών-επιτόπιων χρηστών, κα)
")