Κατέβασμα παρουσίασης
Η παρουσίαση φορτώνεται. Παρακαλείστε να περιμένετε

1
Sisteme avansate de analiza si prelucrare a imaginilor

2
Notare Bibliografie laborator: 25 puncte tema de casa: 25 puncte
examen final: 50 puncte Bibliografie Rafael C. Gonzalez, Richard E. Woods - Digital Image Processing, (Prentice-Hall). Young I. T., Gerbrands J. J., Van Vliet L. J. – Fundamentals of Image Processing (Delft University of Technology). William K. Pratt - Digital Image Processing (John Wiley & Sons). Bernd Jähne - Digital Image Processing (Springer-Verlag Berlin Heidelberg). Conway J., Gustavson T. – Image Processing (Onsala Space Observatory).
. Young I. T., Gerbrands J. J., Van Vliet L. J. – Fundamentals of Image Processing (Delft University of Technology). William K. Pratt - Digital Image Processing (John Wiley & Sons). Bernd Jähne - Digital Image Processing (Springer-Verlag Berlin Heidelberg). Conway J., Gustavson T. – Image Processing (Onsala Space Observatory).")
3
1. RESTAURAREA IMAGINILOR
(1/2) MODEL AL PROCESULUI DE DEGRADARE/RESTAURARE A UNEI IMAGINI MODELE DE ZGOMOT RESTAURARE IN PREZENTA ZGOMOTULUI PRIN FILTRARE SPATIALA
 MODEL AL PROCESULUI DE DEGRADARE/RESTAURARE A UNEI IMAGINI. MODELE DE ZGOMOT. RESTAURARE IN PREZENTA ZGOMOTULUI PRIN FILTRARE SPATIALA.")
4
Scop: -imbunatatirea unei imagini intr-un anumit sens predefinit; -reconstruirea sau refacerea unei imagini degradate, prin utilizarea unor informatii despre fenomenul de degradare. Modelarea degradarii si aplicarea procesului invers imaginea originala. Tehnicile de imbunatatire: aspectele psihofizice ale sistemului vizual uman (ex: accentuarea contrastului). =>indepartarea « blur »-ului tehnica de restaurare.
. =>indepartarea « blur »-ului tehnica de restaurare.")
5
MODEL AL PROCESULUI DE DEGRADARE/RESTAURARE A UNEI IMAGINI
Daca H este un proces liniar, invariant pozitional: g(x,y) = h(x,y) * f(x,y) + η(x,y) ‘ * ‘operatia de convolutie. In domeniul frecventa se obtine : G(u,v) = H(u,v) F(u,v) + N(u,v)
 = h(x,y) * f(x,y) + η(x,y) ‘ * ‘operatia de convolutie. In domeniul frecventa se obtine : G(u,v) = H(u,v) F(u,v) + N(u,v)")
6
MODELE DE ZGOMOT Principalele surse de zgomot: achizitia si transmisia imaginilor. -camera CCD: zgomot influentat de nivelurile de iluminare si temperatura senzorului; -transmisia imaginilor: interferente in canalele de transmisie; -retea wireless: fenomene atmosferice (fulgere). Proprietatile spatiale si de frecventa ale zgomotului! -zgomot alb (spectrul Fourier al zgomotului este constant, iar transformata Fourier a unei functii continand toate frecventele in proportii egale este o constanta). -zgomotul periodic spatial: interferente electrice sau mecanice, in timpul procesului de achizitie; => se presupune in continuare: zgomotul este independent de coordonatele spatiale!
. Proprietatile spatiale si de frecventa ale zgomotului! -zgomot alb (spectrul Fourier al zgomotului este constant, iar transformata Fourier a unei functii continand toate frecventele in proportii egale este o constanta). -zgomotul periodic spatial: interferente electrice sau mecanice, in timpul procesului de achizitie; => se presupune in continuare: zgomotul este independent de coordonatele spatiale!")
7
Functii de densitate de probabilitate pentru zgomot
Descriptorul spatial pentru zgomot : comportarea statistica a nivelurilor de gri din componenta de zgomot =>niveluri ~ variabile aleatoare caracterizate printr-o functie de densitate de probabilitate (PDF – « probability density function »). Functia de distributie a probabilitatii, notata P(a): probabilitatea ca o stralucire (valoarea unui pixel) aleasa din regiune sa fie mai mica sau egala cu o valoare data a. Functia de densitate a probabilitatii, notata p(a): probabilitatea ca o stralucire dintr-o regiune sa fie cuprinsa intre a si a+Δa.
. Functia de distributie a probabilitatii, notata P(a): probabilitatea ca o stralucire (valoarea unui pixel) aleasa din regiune sa fie mai mica sau egala cu o valoare data a. Functia de densitate a probabilitatii, notata p(a): probabilitatea ca o stralucire dintr-o regiune sa fie cuprinsa intre a si a+Δa.")
8
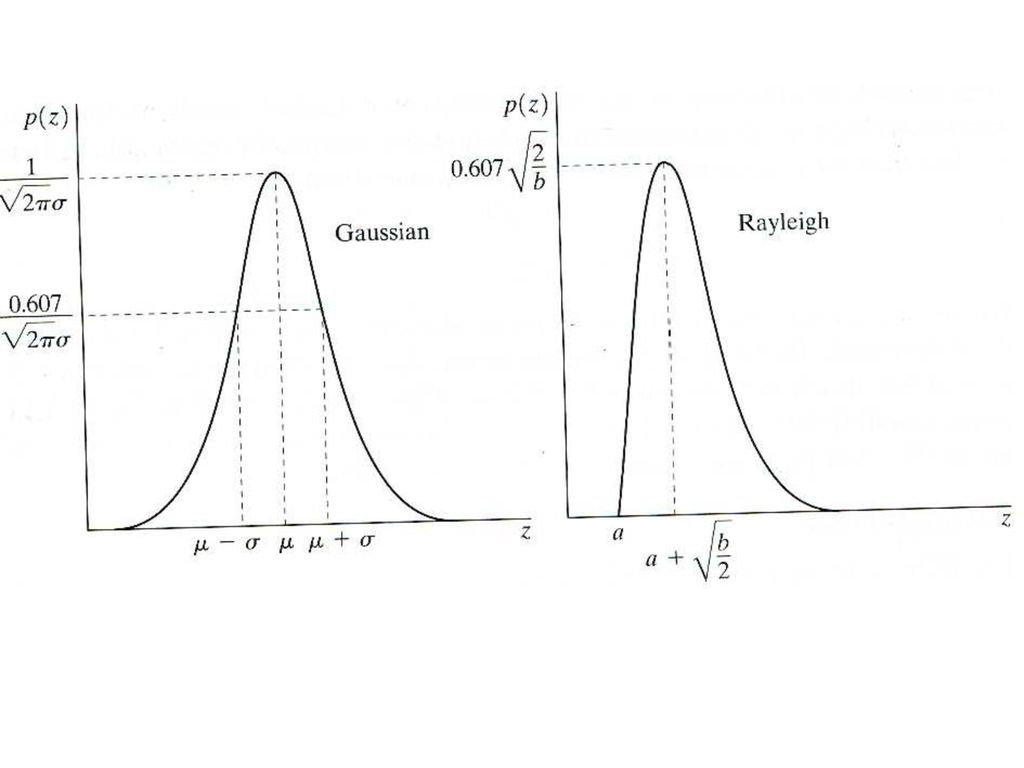
Zgomot Gaussian (zgomot normal): model mult folosit in practica!
PDF pentru o variabila aleatoare Gaussiana z este : z : nivelul de gri; μ : media lui z; σ : deviatia standard. σ2 : varianta lui z. ~70% din valorile lui z apartin [μ-σ, μ+σ]; ~95% in intervalul [μ-2σ, μ+2σ]. Zgomotul Gaussian : cauzat de circuitele electrice si de senzor la iluminare slaba si/sau temperatura inalta.

9
Zgomot Rayleigh Media si varianta acestei functii sunt : Grafic: deplasarea fata de origine si deformarea spre dreapta. => utila pentru aproximarea histogramelor deformate. Rayleigh: zgomotul in imagini de tipul "high dynamic range imaging”

11
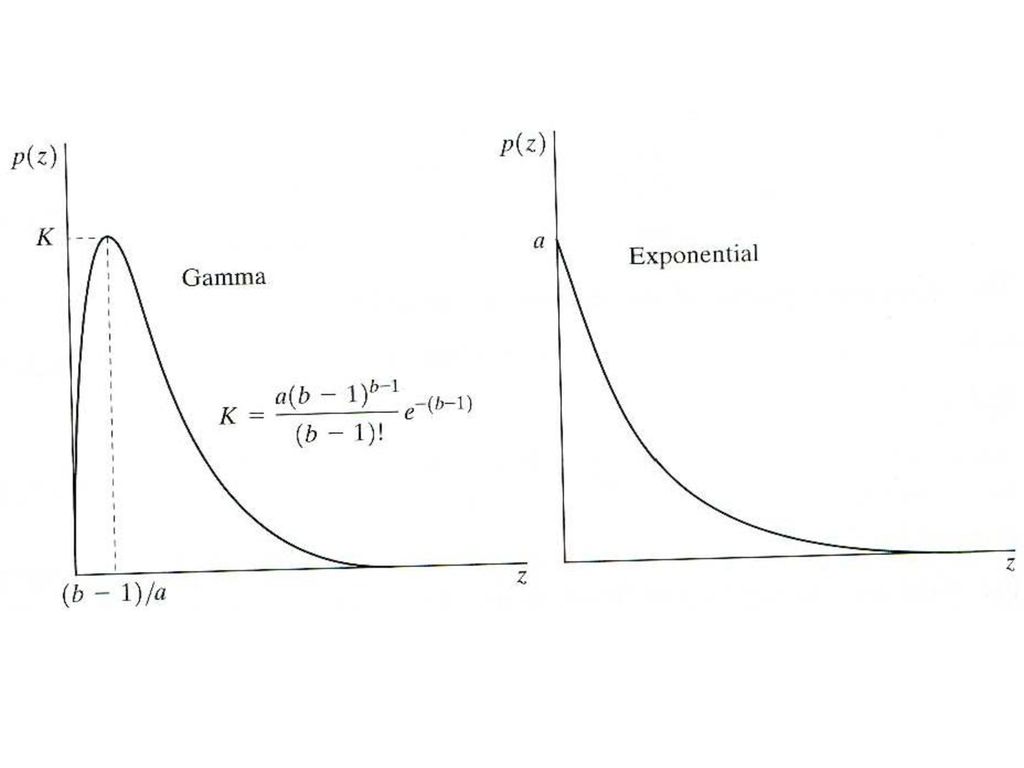
Zgomot Erlang (Gamma) a>0, b intreg pozitiv. Media si varianta : Uneori: functia de densitate gamma (corect doar daca la numitor apare functia gamma Γ(b), altfel se numeste functia de densitate Erlang). Pentru b intreg functia gamma este Γ(b) = (b – 1)! Aplicatii: in imagistica bazata pe laser.
, altfel se numeste functia de densitate Erlang). Pentru b intreg functia gamma este Γ(b) = (b – 1)! Aplicatii: in imagistica bazata pe laser.")
12
Zgomot exponential a>0 Media si varianta : Caz particular al functiei Erlang, cu b=1. Aplicatii in imagistica bazata pe laser.

14
Zgomot uniform Media si varianta : Caracterizeaza cel mai putin situatiile practice. Totusi PDF este utila in generatoarele de numere aleatoare utilizate in simulari.

15
Zgomot impuls (« sare-si-piper »)
In procesul de digitizare: zgomotul impuls este mare in comparatie cu semnalul din imagine => valorile maxima (alb) si minima (negru). Daca, fie Pa , fie Pb este zero, zgomotul impuls se numeste unipolar. Apare: evenimente tranzitorii rapide.
 si minima (negru). Daca, fie Pa , fie Pb este zero, zgomotul impuls se numeste unipolar. Apare: evenimente tranzitorii rapide.")
17
Imagine de test cu trei niveluri de gri:

20
Estimarea parametrilor zgomotului
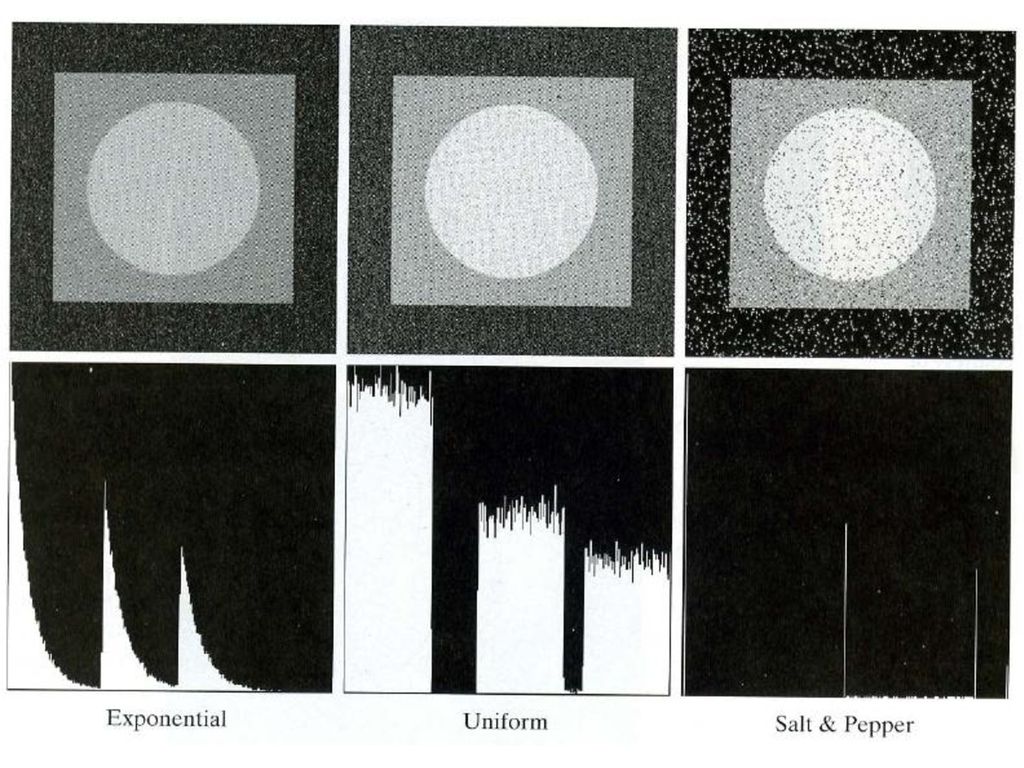
Parametrii PDF-ului zgomotului: -cunoscuti partial din specificatiile senzorului de imagine; -estimati prin preluarea unui set de imagini uniforme (exemplu : un perete gri uniform iluminat). In cazul in care sunt disponibile numai imaginile achizitionate (fara sistemul de achizitie): mici zone de imagine, avand un nivel de gri constant (dar afectate de zgomot). Exemplu pentru zona de 150x20 pixeli se construieste histograma si forma acesteia indica tipul de zgomot care afecteaza imaginea.
. In cazul in care sunt disponibile numai imaginile achizitionate (fara sistemul de achizitie): mici zone de imagine, avand un nivel de gri constant (dar afectate de zgomot). Exemplu pentru zona de 150x20 pixeli se construieste histograma si forma acesteia indica tipul de zgomot care afecteaza imaginea.")
21
Exemplu: zona de 150x20 pixeli histograma => forma indica tipul de zgomot!
a) b) c) => a) zgomot Gaussian, b) zgomot Rayleigh si c) zgomot uniform.
![]()
22
Utilizarea datelor din regiuni (subimagini) S : calculare a mediei si variantei nivelurilor de gri:
zi : niveluri de gri ale pixelilor din S; p(zi) : valorile corespunzatoare din histograma normalizata. Daca zgomot Gaussian => PDF complet determinat (μ si σ). Daca alt tip de zgomot: μ, σ rezolvarea ecuatiilor => a, b. Zgomotul impuls : estimare a probabilitatilor de aparitie a pixelilor albi si pixelilor negri. Se selecteaza o regiune cu nivel de gri constant cuprins intre alb si negru histograma => varfurile corespunzatoare pixelilor albi si pixelilor negri ~ estimare Pa , Pb.
 : valorile corespunzatoare din histograma normalizata. Daca zgomot Gaussian => PDF complet determinat (μ si σ). Daca alt tip de zgomot: μ, σ rezolvarea ecuatiilor => a, b. Zgomotul impuls : estimare a probabilitatilor de aparitie a pixelilor albi si pixelilor negri. Se selecteaza o regiune cu nivel de gri constant cuprins intre alb si negru histograma => varfurile corespunzatoare pixelilor albi si pixelilor negri ~ estimare Pa , Pb.")
23
RESTAURARE IN PREZENTA ZGOMOTULUI PRIN FILTRARE SPATIALA
g(x,y) = h(x,y) * f(x,y) + η(x,y) G(u,v) = H(u,v) F(u,v) + N(u,v) Daca singura degradare dintr-o imagine este zgomotul : g(x,y) = f(x,y) + η(x,y) G(u,v) = F(u,v) + N(u,v) Termenul de zgomot: necunoscut! => nu poate fi scazut direct din ecuatiile pentru g(x,y) si G(u,v). Zgomot periodic: se poate estima N(u,v) din spectrul lui G(u,v) => G(u,v) - N(u,v) => estimare a imaginii originale. Numai zgomot aditiv: filtrare spatiala!
 = h(x,y) * f(x,y) + η(x,y) G(u,v) = H(u,v) F(u,v) + N(u,v) Daca singura degradare dintr-o imagine este zgomotul : g(x,y) = f(x,y) + η(x,y) G(u,v) = F(u,v) + N(u,v) Termenul de zgomot: necunoscut! => nu poate fi scazut direct din ecuatiile pentru g(x,y) si G(u,v). Zgomot periodic: se poate estima N(u,v) din spectrul lui G(u,v) => G(u,v) - N(u,v) => estimare a imaginii originale. Numai zgomot aditiv: filtrare spatiala!")
24
Filtre de medie Filtru de medie aritmetica.
Sxy fereastra rectangulara mxn, centrata in (x,y): Implementare: masca de convolutie, coeficientii 1/mn.
: Implementare: masca de convolutie, coeficientii 1/mn.")
25
Filtru de medie geometrica
=> filtrare comparabila cu cea a filtrului de medie aritmetica, dar cu o pierdere mai mica a detaliilor!

26
Filtru de medie armonica
Avantaje: -zgomot tip « sare »; - alte tipuri de zgomote (ex.Gaussian). Dezavantaj: -zgomot tip « piper ».
. Dezavantaj: -zgomot tip « piper ».")
27
Filtru de medie contra-armonica
Q : ordinul filtrului. Eficient: « sare-si-piper » Q pozitiv : « piper »; Q negativ : « sare ». De remarcat : Q=0 filtru medie aritmetica; Q=1 filtru medie armonica.

28
Aplicatia 1. a) Imaginea cu raze X a unei placi de circuite. b) Imaginea afectata de zgomot Gaussian cu media zero si varianta 400 (nivel mare de zgomot). c) Filtrare cu filtru de medie aritmetica de dimensiune 3x3. d) Filtrare cu filtru de medie geometrica de dimensiune 3x3. => Efectele sunt asemanatoare, dar filtrul de medie geometrica micsoreaza efectul de blur (vezi conectorii din partea superioara).
 Imaginea afectata de zgomot Gaussian cu media zero si varianta 400 (nivel mare de zgomot). c) Filtrare cu filtru de medie aritmetica de dimensiune 3x3. d) Filtrare cu filtru de medie geometrica de dimensiune 3x3. => Efectele sunt asemanatoare, dar filtrul de medie geometrica micsoreaza efectul de blur (vezi conectorii din partea superioara).")
29
a) b) c) d)
 b) c) d)")
30
Aplicatia 2. Aceeasi imagine:
a) afectata de zgomot « piper » cu probabilitatea 0.1. b) afectata de zgomot « sare » cu probabilitatea tot 0.1. c) rezultatul dupa filtrul medie contra-armonica cu Q=1.5 . d) cu Q=-1.5. => Filtrul cu Q pozitiv a curatat mai bine fondul, dar efect de blur pentru zonele intunecate, iar filtrul cu Q negativ, invers.
 afectata de zgomot « piper » cu probabilitatea 0.1. b) afectata de zgomot « sare » cu probabilitatea tot 0.1. c) rezultatul dupa filtrul medie contra-armonica cu Q=1.5 . d) cu Q=-1.5. => Filtrul cu Q pozitiv a curatat mai bine fondul, dar efect de blur pentru zonele intunecate, iar filtrul cu Q negativ, invers.")
31
b) a) c) d)
 a) c) d)")
32
Concluzii filtre de medie:
-filtrele de medie aritmetica si medie geometrica eficiente pentru zgomot aleator (Gaussian, uniform); -Filtrul contra-armonic util pentru zgomot impuls. Dezavantaj: trebuie sa se cunoasca zgomotul intunecat / luminos => semnul lui Q (semn incorect conduce rezultate dezastroase!).
; -Filtrul contra-armonic util pentru zgomot impuls. Dezavantaj: trebuie sa se cunoasca zgomotul intunecat / luminos. => semnul lui Q (semn incorect conduce rezultate dezastroase!).")
33
Filtre statistici de ordine
-filtre spatiale bazate pe ordonarea pixelilor. Filtru median (ordonare crescatoare a valorilor pixelilor din fereastra valoarea din mijloc)
")
34
Aplicatie. (a) Imaginea cu zgomot « sare-si-piper » (b) filtrata cu filtru medie aritmetica (c) si respectiv filtru median. Avantaje filtru median: -anumite zgomote aleatoare micsoreaza efectul de blur (fata de filtrele liniare de netezire similare); -zgomot bipolar si unipolar; -poate fi aplicat succesiv de mai multe ori (numarul de repetari blur).
; -zgomot bipolar si unipolar; -poate fi aplicat succesiv de mai multe ori (numarul de repetari blur).")
35
Filtre max si min Procentajul (p%) unei distributii a stralucirii este definit ca aceea valoare a a stralucirii astfel incat: Cazuri speciale frecvent utilizate in prelucrarile de imagini: -0% : valoarea minima in regiune; -50% : valoarea mediana (filtrul median ~ procentajul 50%); -100% : valoarea maxima.
; -100% : valoarea maxima.")
36
Procentajul 100% filtrul max :
reduce zgomotul tip « piper ». Procentajul 0% filtrul min : reduce zgomotul tip « sare ».

37
Aplicatie. (a) Imaginea deteriorata de zgomot « piper » din aplicatia 2 a) de la “Filtre de medie” filtrata cu filtru max. (b) Imaginea deteriorata de zgomot «sare » din aplicatia 2 b) de la “Filtre de medie” filtrata cu filtru min. b) => Filtrul max a redus « piperul » (dar a eliminat si pixeli de pe granita obiectelor intunecate). => Filtrul min a redus « sarea » (dar a eliminat si pixeli de pe granita obiectelor luminoase).
 => Filtrul max a redus « piperul » (dar a eliminat si pixeli de pe granita obiectelor intunecate). => Filtrul min a redus « sarea » (dar a eliminat si pixeli de pe granita obiectelor luminoase).")
38
Filtru punct mijlociu => combina statistica de ordine cu medierea. Avantaj: zgomot distribuit aleator(Gaussian, uniform).
.")
39
Filtru « alpha-trimmed mean filter »
-calculeaza media din fereastra dar dupa ce au fost eliminate cele mai mici d/2 valori si cele mai mari d/2 valori : gr(s,t) : valorile ramase dupa eliminare. d : 0 … mn-1. => d=0 filtrul medie aritmetica; => d=mn-1 filtrul median. Alte valori ale lui d : imagini cu tipuri multiple de zgomot(« sare-si-piper » + Gaussian).
 : valorile ramase dupa eliminare. d : 0 … mn-1. => d=0 filtrul medie aritmetica; => d=mn-1 filtrul median. Alte valori ale lui d : imagini cu tipuri multiple de zgomot(« sare-si-piper » + Gaussian).")
40
Aplicatie. (a) imaginea degradata cu zgomot aditiv uniform (nivel inalt) avand media zero si varianta 800 ; (b) la aceasta imagine se adauga zgomot « sare-si-piper » cu Pa = Pb = 0.1 ; a) b)
 b)")
41
(c) filtrare cu filtru medie aritmetica ; (d) filtrare cu filtru medie geometrica ;
c) d)
 d)")
42
(e) filtrare cu filtru median ; (f) filtrare cu « alpha-trimmed mean filter » ,d/2 = 5 (toate de dimensiune 5x5). e) f) => Filtrele medie aritmetica si geometrica ineficiente (cauza: zgomotul impuls). =>Filtrele median si « alpha-trimmed mean filter » mai bune. =>Cel mai bun rezultat: « alpha-trimmed mean filter » (d mare => se apropie de performanta filtrului median, avand insa in continuare capacitate de netezire).
 f) => Filtrele medie aritmetica si geometrica ineficiente (cauza: zgomotul impuls). =>Filtrele median si « alpha-trimmed mean filter » mai bune. =>Cel mai bun rezultat: « alpha-trimmed mean filter » (d mare => se apropie de performanta filtrului median, avand insa in continuare capacitate de netezire).")
43
Filtre adaptive Filtrele precedente: nu tin cont de variatiile de la o regiune la alta. Filtrele adaptive: isi modifica comportarea pe baza caracteristicilor statistice din interiorul regiunii de filtrare, definita de fereastra rectangulara mxn notata Sxy. => capacitatea de filtrare ↑ => complexitatea ↑ Filtru adaptiv de reducere a zgomotului local Marimi : -g(x,y) valoarea pixelului in punctul (x,y) din imaginea cu zgomot ; -σ2η varianta zgomotului care se adauga la imaginea originala f(x,y) pentru a forma imaginea degradata g(x,y) ; -mL media locala din Sxy ; - σ2L varianta locala a pixelilor din Sxy .
 valoarea pixelului in punctul (x,y) din imaginea cu zgomot ; -σ2η varianta zgomotului care se adauga la imaginea originala f(x,y) pentru a forma imaginea degradata g(x,y) ; -mL media locala din Sxy ; - σ2L varianta locala a pixelilor din Sxy .")
44
Comportarea filtrului :
-daca σ2η = 0 => g(x,y) (fara zgomot, g(x,y)=f(x,y) ); -daca σ2L >> σ2η => ~g(x,y) (muchii care trebuie conservate); -daca σ2L = σ2η => media aritmetica a pixelilor din Sxy (regiunea locala are aceleasi proprietati ca intreaga imagine => zgomotul local este redus prin mediere). Se obtine formula: Trebuie estimata σ2η (celelalte se pot calcula din fereastra curenta). Se presupune : σ2η ≤ σ2L (zgomotul este aditiv si independent pozitional, iar Sxy este un subset al imaginii intregi g(x,y) ). -daca σ2η > σ2L => σ2η/σ2L =1 => filtrul neliniar, se evita obtinerea unor valori necosistente (valori negative de pixeli).
 (fara zgomot, g(x,y)=f(x,y) ); -daca σ2L >> σ2η => ~g(x,y) (muchii care trebuie conservate); -daca σ2L = σ2η => media aritmetica a pixelilor din Sxy (regiunea locala are aceleasi proprietati ca intreaga imagine => zgomotul local este redus prin mediere). Se obtine formula: Trebuie estimata σ2η (celelalte se pot calcula din fereastra curenta). Se presupune : σ2η ≤ σ2L (zgomotul este aditiv si independent pozitional, iar Sxy este un subset al imaginii intregi g(x,y) ). -daca σ2η > σ2L => σ2η/σ2L =1 => filtrul neliniar, se evita obtinerea unor valori necosistente (valori negative de pixeli).")
45
Aplicatie. (a) imagine afectata de zgomot Gaussian cu media 0 si varianta 1000 (zgomot mare) ; (b) filtrare cu filtru medie aritmetica 7x7 => blur ; a) b)
 b)")
46
(c) filtrare cu filtru medie geometrica 7x7 => blur ; (d) filtrare cu filtru adaptiv avand σ2η = 1000 => filtrare comparabila cu cele precedente, dar in plus contururile au fost mult mai bine conservate. c) d)
 d)")
47
Filtru adaptiv median. Filtrul median eficient pentru zgomot impuls mic (Pa , Pb < 0.2). Zgomotul impuls mai mare => filtru adaptiv median. Notatii: -zmin valoarea minima de nivel de gri in Sxy ; -zmax valoarea maxima ; -zmed valoarea mediana ; -zxy valoarea in punctul (x,y) ; -Smax dimensiunea maxima permisa pentru Sxy. Filtrul adaptiv median lucreaza in doua niveluri, A si B. Obiectivele algoritmului: 1) indepartarea zgomotului « sare-si-piper »; 2) netezirea zgomotelor de alt tip; 3) reducerea distorsiunilor (ca subtierea sau ingrosarea excesiva a frontierelor).
 ; -Smax dimensiunea maxima permisa pentru Sxy. Filtrul adaptiv median lucreaza in doua niveluri, A si B. Obiectivele algoritmului: 1) indepartarea zgomotului « sare-si-piper »; 2) netezirea zgomotelor de alt tip; 3) reducerea distorsiunilor (ca subtierea sau ingrosarea excesiva a frontierelor).")
48
Nivel A : A1 = zmed – zmin A2 = zmed – zmax if A1>0 AND A2<0 goto Nivel B else mareste dimensiunea ferestrei if dimensiunea ferestrei ≤ Smax repeat Nivel A output zxy Nivel B : B1 = zxy – zmin B2 = zxy – zmax if B1>0 AND B2<0 output zmed

Παρόμοιες παρουσιάσεις




















>")
