Κατέβασμα παρουσίασης
1
傳統閉迴路控制系統 控制器 致動器 (馬達) 過程 (手臂) 感測器 設定點 受控結果 誤差 比較器
 過程 (手臂) 感測器 設定點 受控結果 誤差 比較器")
2
ΔPID控制器 P 控制器 : 比例放大誤差訊號 I 控制器 : 積分放大誤差訊號 D 控制器 : 微分放大誤差訊號

3
P控制器

4
D控制器

5
I 控制器

6
模糊邏輯迴路 控制器 致動器 (馬達) 過程 感測器 設定點 受控結果 解模糊 模糊化
 過程 感測器 設定點 受控結果 解模糊 模糊化")
7
模糊控制FUZZY CONTROL 以人類經驗來當判斷依據,不需要建立受控系統的模型也無需使用任何控制法則。
模糊化 :對相同的狀況,我們會有超過一種以上的感覺。 控制器 :根據人類經驗對不同感覺做出反應。 解模糊 :最後的實際輸出為所有反應規則之總合。

8
Δ模糊化

9
Δ控制器(經驗法則) 規則一:溫度是冷且變冷中,則開大瓦斯量(+5) 規則二:溫度是冷且不變中,則開瓦斯量(+2)
規則三:溫度是冷且變熱中,則瓦斯量不變(0) 規則四:溫度是適中且變冷中,則開瓦斯量(+2) 規則五:溫度是適中且不變中,則瓦斯量不變(0) 規則六:溫度是適中且變熱中,則減少瓦斯量變(-2) 規則七:溫度是熱且變冷中,則瓦斯量不變(0) 規則八:溫度是熱且不變中,則減少瓦斯量(-2) 規則九:溫度是熱且變熱中,則大減瓦斯量(-5)
 規則四:溫度是適中且變冷中,則開瓦斯量(+2) 規則五:溫度是適中且不變中,則瓦斯量不變(0) 規則六:溫度是適中且變熱中,則減少瓦斯量變(-2) 規則七:溫度是熱且變冷中,則瓦斯量不變(0) 規則八:溫度是熱且不變中,則減少瓦斯量(-2) 規則九:溫度是熱且變熱中,則大減瓦斯量(-5)")
10
模糊控制器(經驗法則)
")
11
Δ解模糊 相容度 = : 相容度 : 狀況一的機率 : 狀況二的機率 各別出力 = : 出力 : 輸出對應值 ‧ 最後出力

12
Δ何謂類神經網路 一種基於腦與神經系統研究所啟發的資料處理技術 真實系統 輸入 輸出 系統模型 (類神經網路) 輸入 輸出
 輸入 輸出")
13
輸入 數值 輸入 分類 Δ利用已知的輸入與輸出來建立模型 輸出為連續數值的變化:強度、溫度、濃度等
輸出為代表的分類變數 : 故障原因、疾病種類、買賣決議等 函數 輸入 數值 分類器 輸入 分類

14
Δ神經元模型

15
Δ神經元輸出 輸出順序 : 由其他的神經元突觸軸索突觸 輸出強弱 : 由興奮突觸激發強 抑制突觸激發弱
輸出 : 由所有突觸輸入值之加權乘積和

16
Δ傳統迴歸資料分析 輸入 : x1 x2 x3 x4….. 輸出 : y1 y2 y3 y4….. n次迴歸 :
求係數 、 、 、 、 、 、 、 、 、

17
輸入 : 1、 5 、8 、11 輸出 : 100 、200 、500 、800 以三次多項式來迴歸 預測當輸入為9時 輸出為

18
神經網路資料分析

19
輸入層 : 輸入外在環境的訊息 隱藏層 : 提供類神經網路表現處理單元間的交互作用 輸出層 : 處理單元以輸出訊息給外在環境

20
Δ類神經網路演算過程 建立輸入變數 : Xi 決策建立 : 經驗而得(經驗越多越精確) 隱藏層處理單元決定 : Hi
訓練學習 : 給初始連結加權值 與門限 值 重複學習直到收斂:計算輸出與實際輸出的差值最小

21
隱形眼鏡決策 輸入與輸出的定義

22
決策建立

23
決策的法則集

24
輸入層 : 4個變數 X1 X2 X3 X4 隱藏層 : 8個神經元 H1 H2 H3 H4 H5 H6 H7 H8

25
隱藏層 : 8個神經元 H1 H2 H3 H4 H5 H6 H7 H8 輸出層 : 3個變數 Y1 Y2 Y3

26
機電整合的定義 產業界使用機械人或自動裝配系統從事生產,以降低成本、增進品質並增加強競爭能力,乃是時勢所趨,此種被稱為工廠自動化 (FA) 的技術,其實就是機械、控制電路以及電腦所組成而成,機械和電子電路的整合體通常被稱為機電整合 機電整合 (mechatronics) 一詞是由日本首先創造出來而轉化為英文的日式英文,目前因廣泛使用而成為世界通用的名詞,它是由機械學 (mechanics) 的前半部 (mecha) 和電子學 (electronicts) 的後半部 (tronics) 合併成 (mechatronics) 一詞沿用至今。
 一詞是由日本首先創造出來而轉化為英文的日式英文,目前因廣泛使用而成為世界通用的名詞,它是由機械學 (mechanics) 的前半部 (mecha) 和電子學 (electronicts) 的後半部 (tronics) 合併成 (mechatronics) 一詞沿用至今。")
27
機電整合機械人的動作,大致上有檢出、判斷、驅動等三種基本動作。

28
Δ機械人控制開迴路系統 輸入 輸出 感測器 : 極限開關 近接開關 控制器 : 可程式控制器 致動器 : 步進馬達 伺服馬達 氣油壓缸
感測器 : 極限開關 近接開關 控制器 : 可程式控制器 致動器 : 步進馬達 伺服馬達 氣油壓缸

29
Δ取放機械人(BANG-BANG ROBOT) : 重複性動作
自由度 : 旋轉移動軸 動力來緣 : 馬達 氣壓缸 油壓缸 控制器 : PLC 感測器 : 極限開關 近接開關

30
三個主要軸的機械人幾何型態 (三個自由度)
")
31
關節動力源 電力式馬達 :步進馬達 DC伺服馬達 步進馬達 : 一個PULSE產生一定的轉角 故常使用於開迴路控制

32
氣壓式致動器 優點 : 成本低 取放式的機械手常使用 缺點 : 1. 氣體會壓縮 無法準確達到預定位置 2. 噪音大 3. 容易過熱 影響壽命

33
油壓式致動器 優點 :出力快速穩定 液壓油無法壓縮故比較能準確達到預定位置 缺點 : 1. 液壓油幫浦價錢昂貴 2. 液油外洩 影響環境 3. 液油幫浦聲音過大

34
感測器 極限開關(接觸) 近接開關(非接觸)
 近接開關(非接觸)")
35
Δ可程式控制器 PLC 一種數位動作的電子裝置,利用特定的指令將邏輯、計數、計時、算術與順序控制等指令功能寫入記憶體中,經輸入、輸出元件來控制機械動作或工作程序。 輸入元件 :按鈕開關、緊急開關、選擇開關及機台上的極限開關、光電開關、近接開關。 輸出控制元件 :電磁閥、指示燈、馬達。

36
中央處理器單元包含:(1) 控制匯流排;(2) 算數邏輯運算單元;(3) 暫存器等。
記憶體單元包含:(1) 唯讀記憶體 (ROM);(2) 可讀寫記憶體 (RAM) 等。 輸入 / 輸出模組:輸入 / 輸出模組電路介於中央處理器單元和週邊的輸入 / 輸出裝置之間,用以傳遞彼此信號。一般輸入裝置如按鈕開關、選擇開關、緊急開關、極限開關、光電開關、近接開關等。而輸出裝置如電磁閥、指示燈、馬達、控制電驛、其它顯示裝置等。
 唯讀記憶體 (ROM);(2) 可讀寫記憶體 (RAM) 等。 輸入 / 輸出模組:輸入 / 輸出模組電路介於中央處理器單元和週邊的輸入 / 輸出裝置之間,用以傳遞彼此信號。一般輸入裝置如按鈕開關、選擇開關、緊急開關、極限開關、光電開關、近接開關等。而輸出裝置如電磁閥、指示燈、馬達、控制電驛、其它顯示裝置等。")
37
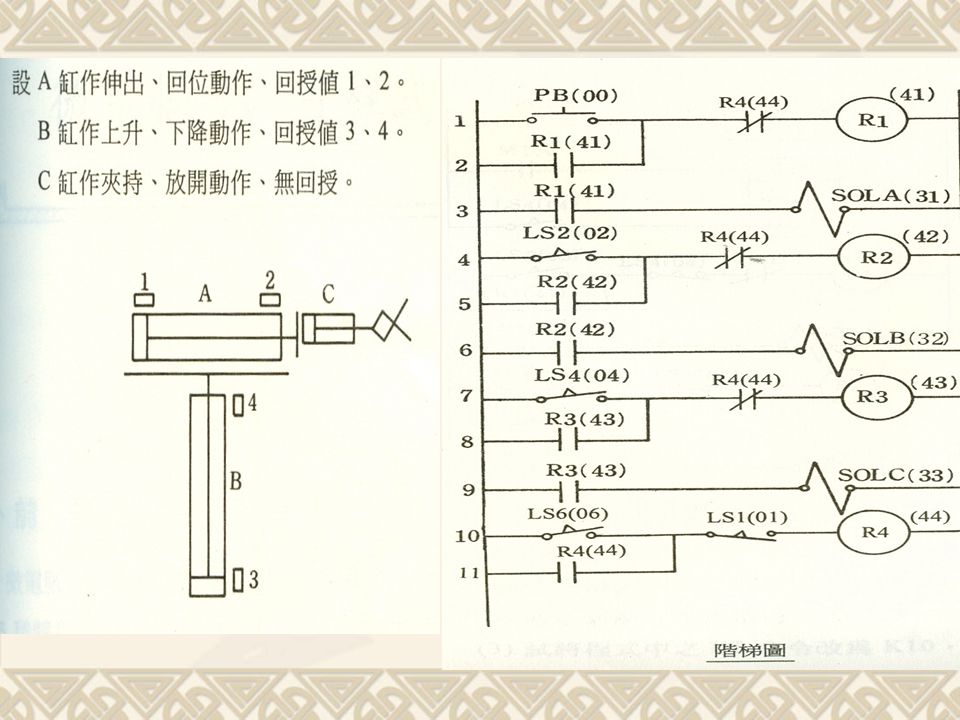
可程式控制器 PLC 程式如何撰寫 針對動作順序畫出階梯圖 當X0為ON時,則執行Y0輸出動作。
當X0為ON時,T0計時1秒後,則執行Y0輸出動作。



 03088007 陈夏琴.>")

 第五次作業 97/04/24.>")
 共射極(CE)電路的頻率響應>")
 共集極(CC)放大器的頻率響應>")
 2 、研究串联谐振现象及电路参数对谐振特性 的影响。>")



 §6-2 集成模数转换器(ADC) §6-3 应用举例>")








