Κατέβασμα παρουσίασης
Η παρουσίαση φορτώνεται. Παρακαλείστε να περιμένετε

1
Διπλωματική Εργασία με θέμα:
ΠΑΝΕΠΙΣΤΗΜΙΟ ΠΑΤΡΩΝ ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΚΑΙ ΑΕΡΟΝΑΥΠΗΓΩΝ ΜΗΧΑΝΙΚΩΝ ΚΑΤΑΣΚΕΥΑΣΤΙΚΟΣ ΤΟΜΕΑΣ ΕΡΓΑΣΤΗΡΙΟ ΣΤΟΙΧΕΙΩΝ ΜΗΧΑΝΩΝ Διπλωματική Εργασία με θέμα: ΠΛΑΝΗΤΙΚΟΣ ΜΕΙΩΤΗΡΑΣ: ΣΧΕΔΙΑΣΜΟΣ, ΚΙΝΗΜΑΤΙΚΗ – ΔΥΝΑΜΙΚΗ ΑΝΑΛΥΣΗ ΚΑΙ ΕΛΕΓΧΟΣ ΑΝΤΟΧΗΣ ΛΥΜΠΕΡΟΠΟΥΛΟΣ ΠΑΝΑΓΙΩΤΗΣ Α.Μ.: 5656 ΕΠΙΒΛΕΠΩΝ ΚΑΘΗΓΗΤΗΣ: ΧΡΗΣΤΟΣ ΠΑΠΑΔΟΠΟΥΛΟΣ, ΚΑΘΗΓΗΤΗΣ

2
ΠΕΡΙΕΧΟΜΕΝΑ ΣΚΟΠΟΣ ΤΗΣ ΕΡΓΑΣΙΑΣ ΘΕΩΡΙΑ ΠΛΑΝΗΤΙΚΩΝ ΜΕΙΩΤΗΡΩΝ
ΣΧΕΔΙΑΣΜΟΣ ΤΟΥ ΠΛΑΝΗΤΙΚΟΥ ΜΕΙΩΤΗΡΑ ΤΗΣ ΠΑΡΟΥΣΗΣ ΕΡΓΑΣΙΑΣ ΚΙΝΗΜΑΤΙΚΗ ΚΑΙ ΔΥΝΑΜΙΚΗ ΑΝΑΛΥΣΗ ΤΟΥ ΠΛΑΝΗΤΙΚΟΥ ΜΗΧΑΝΙΣΜΟΥ ΕΛΕΓΧΟΣ ΣΕ ΚΑΜΨΗ ΚΑΙ ΕΠΙΦΑΝΕΙΑΚΗ ΠΙΕΣΗ ΤΩΝ ΟΔΟΝΤΩΤΩΝ ΤΡΟΧΩΝ ΚΑΤΑ AGMA

3
ΣΚΟΠΟΣ ΤΗΣ ΕΡΓΑΣΙΑΣ Στόχος της Διπλωματικής Εργασίας είναι η κινηματική και δυναμική ανάλυση και ο έλεγχος σε κάμψη και σε επιφανειακή πίεση κατά AGMA των οδοντωτών τροχών του πλανητικού μηχανισμού κατά τη λειτουργία του. Ο πλανητικός μηχανισμός κατασκευάστηκε στο πλαίσιο της Σπουδαστικής Εργασίας

4
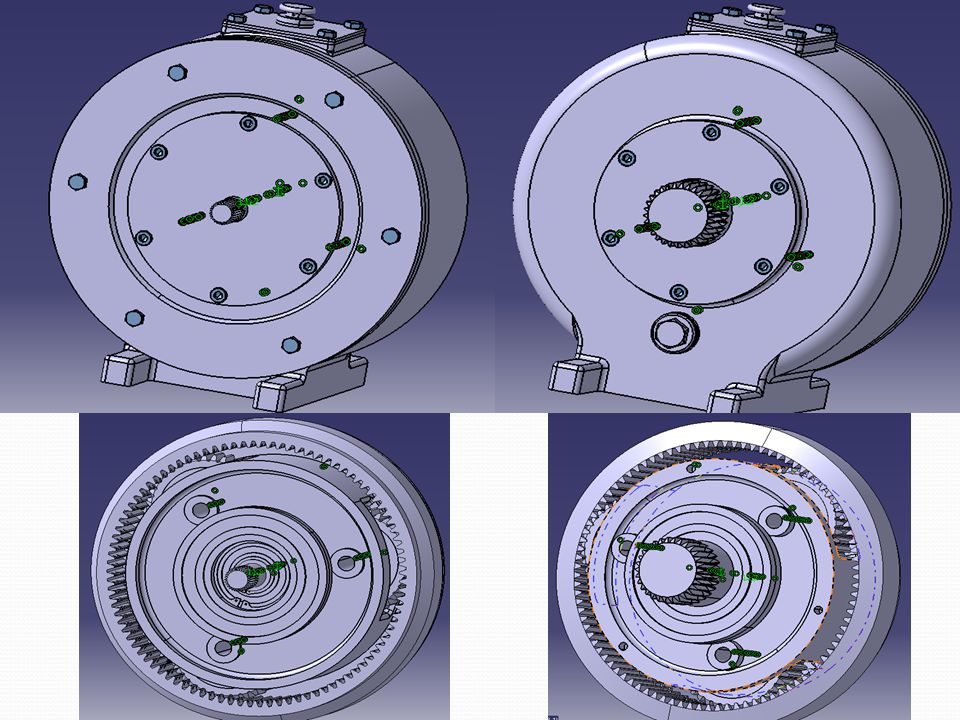
Ένας πλανητικός μειωτήρας στροφών αποτελείται από τρία βασικά εξαρτήματα:
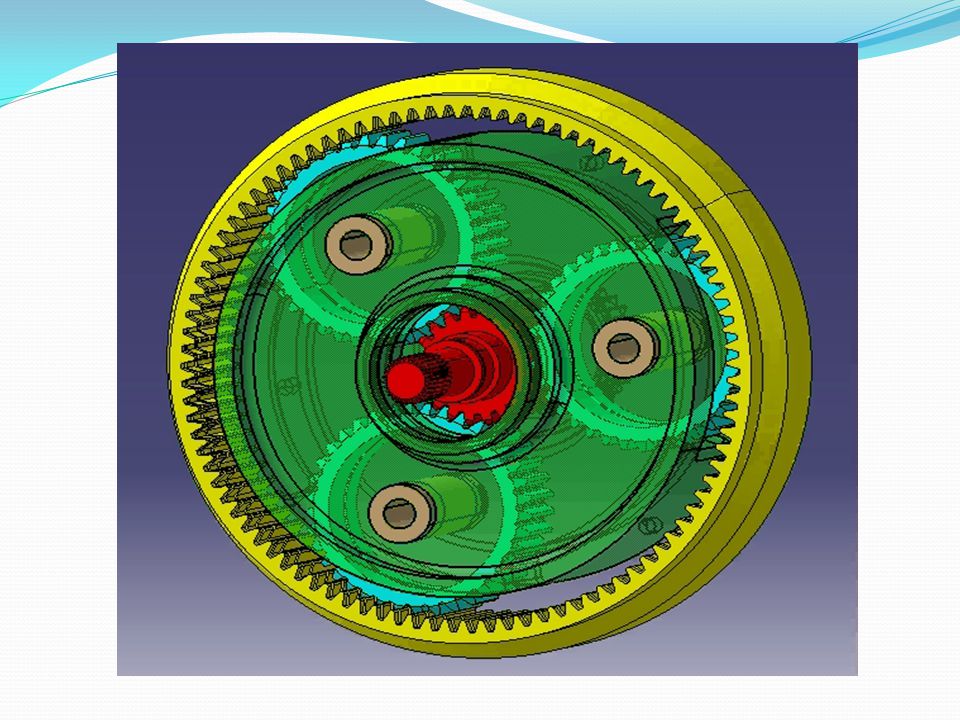
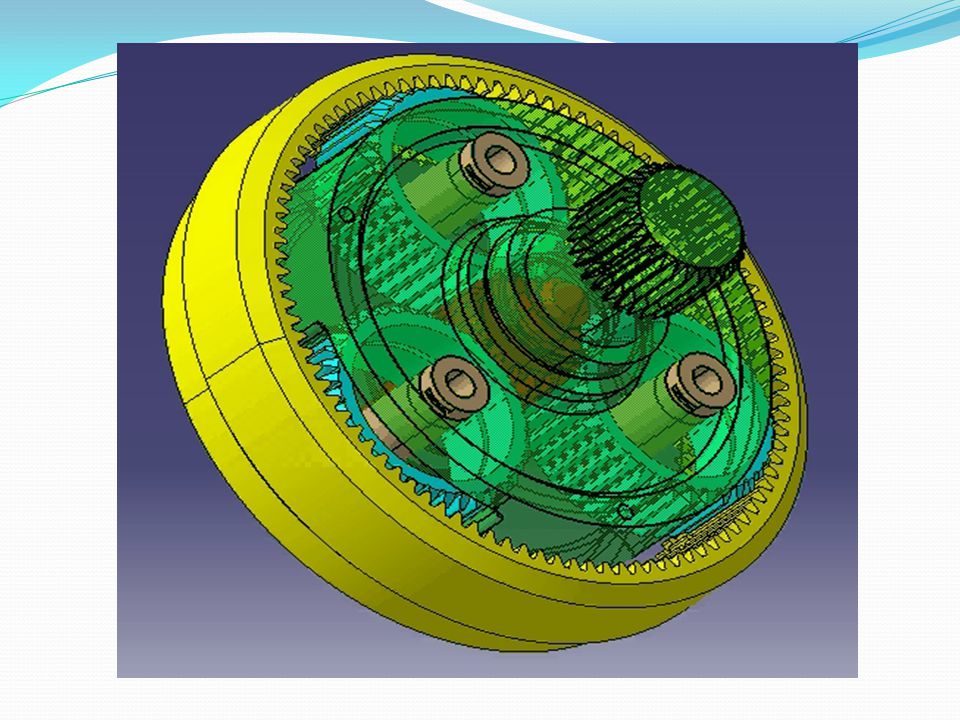
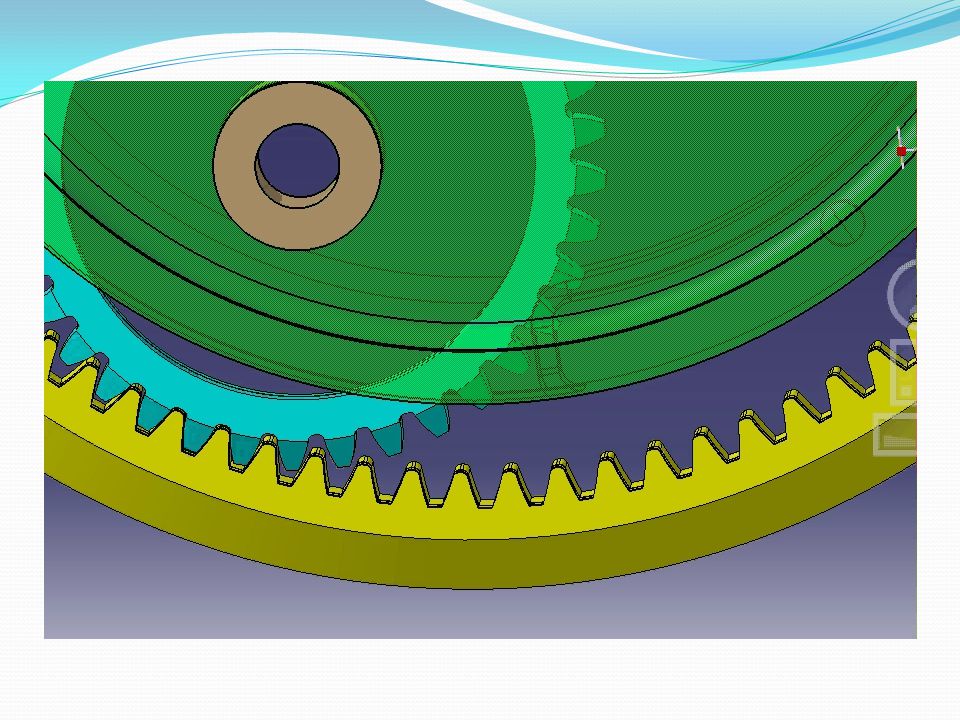
1. Το γρανάζι-ήλιος (sun gear). 2. Τα γρανάζια-πλανήτες (planet gears) μαζί με του άξονες για την έδρασή τους. 3. Το γρανάζι-δαχτυλίδι (ring gear).
. 2. Τα γρανάζια-πλανήτες (planet gears) μαζί με του άξονες για την έδρασή τους. 3. Το γρανάζι-δαχτυλίδι (ring gear).")
5
ΣΧΕΔΙΑΣΜΟΣ ΤΟΥ ΠΛΑΝΗΤΙΚΟΥ ΜΕΙΩΤΗΡΑ ΤΗΣ ΠΑΡΟΥΣΗΣ ΕΡΓΑΣΙΑΣ

7
Ο ΠΛΑΝΗΤΙΚΟΣ ΜΗΧΑΝΙΣΜΟΣ ΚΑΙ ΤΑ ΕΞΑΤΗΜΑΤΑ ΠΟΥ ΤΟΝ ΑΠΟΤΕΛΟΥΝ

8
ΜΟΝΤΕΛΟ ΓΙΑ ΤΗΝ ΑΝΑΛΥΣΗ ΣΤΟ SimDesiger

9
ΚΙΝΗΜΑΤΙΚΗ ΑΝΑΛΥΣΗ Εξωτερικός οδοντωτός ακίνητος ( ω3=0, n3=0 ), Είσοδος το γρανάζι ήλιος και Έξοδος ο άξονας εξόδου. i14 = = Ο ήλιος ακίνητος ( ω1 =0, n1=0 ), Είσοδος ο εξωτερικός οδοντωτός τροχός και Έξοδος ο άξονας εξόδου. i 34 = = Ο βραχίονας ακίνητος ( ω4=n4=0 ), Είσοδος το γρανάζι ήλιος και Έξοδος ο εξωτερικός οδοντωτός τροχός. i13 = =
, Είσοδος ο εξωτερικός οδοντωτός τροχός και Έξοδος ο άξονας εξόδου. i 34 = = Ο βραχίονας ακίνητος ( ω4=n4=0 ), Είσοδος το γρανάζι ήλιος και Έξοδος ο εξωτερικός οδοντωτός τροχός. i13 = =")
10
Ροπή που μεταφέρεται :(Mt)kpcm = 71620 Εφαπτομενική συνιστώσα: Ft =
ΔΥΝΑΜΙΚΗ ΑΝΑΛΥΣΗ Ροπή που μεταφέρεται :(Mt)kpcm = 71620 Εφαπτομενική συνιστώσα: Ft = Ακτινική συνιστώσα: Fr = Ft tanφ Συνολική μεταφερόμενη δύναμη: Fn =
kpcm = Εφαπτομενική συνιστώσα: Ft = Ακτινική συνιστώσα: Fr = Ft tanφ. Συνολική μεταφερόμενη δύναμη: Fn =")
11
ΔΕΔΟΜΕΝΑ ΕΙΣΟΔΟΥ ΤΟΥ ΠΛΑΝΗΤΙΚΟΥ ΜΕΙΩΤΗΡΑ
ΑΝΑΛΥΤΙΚΟΣ ΥΠΟΛΟΓΙΣΜΟΣ ΤΩΝ ΚΙΝΗΜΑΤΙΚΩΝ ΚΑΙ ΔΥΝΑΜΙΚΩΝ ΧΑΡΑΚΤΗΡΙΣΤΙΚΩΝ ΤΟΥ ΜΕΙΩΤΗΡΑ Λόγος μετάδοσης: i14 = = όπου: Ν1 : ο αριθμός των δοντιών του γραναζιού-ήλιος, Ν1 = 20 Ν2: ο αριθμός των δοντιών του πλανήτη, Ν2 = 37 Oπότε : i14 = = 5.7 ΔΕΔΟΜΕΝΑ ΕΙΣΟΔΟΥ ΤΟΥ ΠΛΑΝΗΤΙΚΟΥ ΜΕΙΩΤΗΡΑ Ισχύς στον άξονα εισόδου: 5kW = 6.7 hp Αριθμός στροφών στον άξονα εισόδου: 1500 rpm

12
ΔΥΝΑΜΙΚΑ ΧΑΡΑΚΤΗΙΣΤΙΚΑ
Ισχύς στον άξονα εισόδου: 5kW = 6.7 hp Αριθμός στροφών στον άξονα εισόδου: 1500 rpm (Min) kpcm = 71620 = (Min) kpcm = 71620 = 320 kpcm = Nm (Min) kpcm = 3 * Fts * rs → Fts = (Min) kpcm / 3 * rs → Fts = 320 kp*cm / 3 * 3cm → Fts = 35.5 kp = N Frs = Fts tanφ = tan20 = N Fns2 = Fts 2 + Frs2 → Fns2 = → Fn2 = → Fn = Ν Fout = 2 * Fts = 2 * = N Mout = 3 * Fout * L = 3 * N * 85.5*10-3 m = 177 Nm
 kpcm = = (Min) kpcm = = 320 kpcm = Nm. (Min) kpcm = 3 * Fts * rs → Fts = (Min) kpcm / 3 * rs → Fts = 320 kp*cm / 3 * 3cm → Fts = 35.5 kp = N. Frs = Fts tanφ = tan20 = N. Fns2 = Fts 2 + Frs2 → Fns2 = → Fn2 = → Fn = Ν. Fout = 2 * Fts = 2 * = N. Mout = 3 * Fout * L = 3 * N * 85.5*10-3 m = 177 Nm.")
13
Η ΚΙΝΗΣΗ ΤΟΥ ΜΗΧΑΝΙΣΜΟY ΧΩΡΙΖΕΤΑΙ ΣΕ ΔΥΟ ΦΑΣΕΙΣ: ΜΕΤΑΒΑΤΙΚΗ ΦΑΣΗ ΕΚΚΙΝΗΣΗΣ (Διαρκεί 7 sec και αφορά στην εκκίνηση του μηχανισμού από την ακινησία ως τη στιγμή που η λειτουργία του θα εισέλθει στη μόνιμη κατάσταση.) ΚΑΤΑΣΤΑΣΗ ΜΟΝΙΜΗΣ ΛΕΙΤΟΥΡΓΙΑΣ (Ενδεικτικά για την παρούσα προσομοίωση μελετήθηκε η διάρκεια της κίνησης που αντιστοιχεί στο χρονικό διάστημα που χρειάζεται ο άξονας εξόδου να πραγματοποιήσει μια πλήρη περιστροφή.)
 ΚΑΤΑΣΤΑΣΗ ΜΟΝΙΜΗΣ ΛΕΙΤΟΥΡΓΙΑΣ (Ενδεικτικά για την παρούσα προσομοίωση μελετήθηκε η διάρκεια της κίνησης που αντιστοιχεί στο χρονικό διάστημα που χρειάζεται ο άξονας εξόδου να πραγματοποιήσει μια πλήρη περιστροφή.)")
14
ΠΑΡΟΥΣΙΑΣΗ ΑΠΟΤΕΛΕΣΜΑΤΩΝ ΤΗΣ ΠΡΟΣΟΜΟΙΩΣΗΣ 1
ΠΑΡΟΥΣΙΑΣΗ ΑΠΟΤΕΛΕΣΜΑΤΩΝ ΤΗΣ ΠΡΟΣΟΜΟΙΩΣΗΣ 1. ΜΕΤΑΒΑΤΙΚΗ ΦΑΣΗ ΕΚΚΙΝΗΣΗΣ ΚΙΝΗΜΑΤΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΤΟΥ ΠΛΑΝΗΤΙΚΟΥ ΜΗΧΑΝΙΣΜΟΥ ΑΞΟΝΑΣ ΕΙΣΟΔΟΥ ΑΞΟΝΑΣ ΕΞΟΔΟΥ Ροπή εισόδου σε σχέση με το χρόνο Ροπή εξόδου σε σχέση με το χρόνο Γωνιακή ταχύτητα περιστροφής του άξονα εξόδου σε σχέση με το χρόνο Γωνιακή ταχύτητα περιστροφής του άξονα εισόδου σε σχέση με το χρόνο

15
Κινητική ενέργεια του άξονα εισόδου σε σχέση με το χρόνο
Κινητική ενέργεια του άξονα εξόδου σε σχέση με το χρόνο Κινητική ενέργεια του άξονα εισόδου λόγω μεταφοράς σε σχέση με το χρόνο Κινητική ενέργεια του άξονα εξόδου λόγω μεταφοράς σε σχέση με το χρόνο Κινητική ενέργεια του άξονα εισόδου λόγω περιστροφής σε σχέση με το χρόνο Κινητική ενέργεια του άξονα εξόδου λόγω περιστροφής σε σχέση με το χρόνο

16
ΠΛΑΝΗΤΕΣ Μεταφορική ταχύτητα του κέντρου μάζας του κάθε πλανήτη σε σχέση με το χρόνο Γωνιακή ταχύτητα περιστροφής του κάθε πλανήτη σε σχέση με το χρόνο Κινητική ενέργεια του κάθε πλανήτη λόγω περιστροφής σε σχέση με το χρόνο Κινητική ενέργεια του κάθε πλανήτη σε σχέση με το χρόνο Κινητική ενέργεια λόγω μεταφοράς του κάθε πλανήτη σε σχέση με το χρόνο Θέση του κέντρου μάζας του κάθε πλανήτη

17
ΔΥΝΑΜΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΤΟΥ ΠΛΑΝΗΤΙΚΟΥ ΜΗΧΑΝΙΣΜΟΥ
ΓΡΑΝΑΖΙ-ΗΛΙΟΣ - ΠΛΑΝΗΤΗΣ ΠΛΑΝΗΤΗΣ – ΕΞΩΤΕΡΙΚΟ ΓΡΑΝΑΖΙ Διεύθυνση Χ Διεύθυνση Χ Διεύθυνση Υ Διεύθυνση Υ Διεύθυνση Ζ Διεύθυνση Ζ Εύρος Εύρος

18
2. ΚΑΤΑΣΤΑΣΗ ΜΟΝΙΜΗΣ ΛΕΙΤΟΥΡΓΙΑΣ ΚΙΝΗΜΑΤΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΤΟΥ ΠΛΑΝΗΤΙΚΟΥ ΜΗΧΑΝΙΣΜΟΥ ΑΞΟΝΑΣ ΕΙΣΟΔΟΥ ΑΞΟΝΑΣ ΕΞΟΔΟΥ Ροπή εισόδου σε σχέση με το χρόνο Ροπή εξόδου σε σχέση με το χρόνο Γωνιακή ταχύτητα περιστροφής του άξονα εισόδου σε σχέση με το χρόνο Γωνιακή ταχύτητα του άξονα εξόδου σε σχέση με το χρόνο

19
Κινητική ενέργεια του άξονα εισόδου σε σχέση με το χρόνο
Κινητική ενέργεια του άξονα εξόδουσε σχέση με το χρόνο Κινητική ενέργεια του άξονα εισόδου λόγω μεταφοράς σε σχέση με το χρόνο Κινητική ενέργεια του άξονα εξόδουλόγω μεταφοράς σε σχέση με το χρόνο Κινητική ενέργεια του άξονα εισόδου λόγω περιστροφής σε σχέση με το χρόνο Κινητική ενέργεια του άξονα εξόδουλόγω περιστροφής σε σχέση με το χρόνο

20
Γωνιακή ταχύτητα περιστροφής του κάθε πλανήτη σε σχέση με το χρόνο
ΠΛΑΝΗΤΕΣ Γωνιακή ταχύτητα περιστροφής του κάθε πλανήτη σε σχέση με το χρόνο Μεταφορική ταχύτητα του κέντρου μάζας του κάθε πλανήτη σε σχέση με το χρόνο

21
ΔΥΝΑΜΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΤΟΥ ΠΛΑΝΗΤΙΚΟΥ ΜΗΧΑΝΙΣΜΟΥ
ΓΡΑΝΑΖΙ-ΗΛΙΟΣ - ΠΛΑΝΗΤΗΣ ΠΛΑΝΗΤΗΣ – ΕΞΩΤΕΡΙΚΟ ΓΡΑΝΑΖΙ Διεύθυνση Χ Διεύθυνση Χ Διεύθυνση Υ Διεύθυνση Υ Διεύθυνση Ζ Διεύθυνση Ζ Εύρος Εύρος

22
Άξονας εισόδου – τρείς πλανήτες Πλανήτης – εξωτερικό γρανάζι
Διεύθυνση Υ Διεύθυνση Υ Διεύθυνση Ζ Διεύθυνση Ζ

23
Οι τέσσερις ακραίες θέσεις από τις οποίες διέρχεται ο κάθε πλανήτης κατά την κίνηση του

24
Δυνάμεις μεταξύ του άξονα εισόδου και των τριών πλανητών στις διευθύνσεις Υ και Ζ
Δυνάμεις μεταξύ των τριών πλανητών και του εξωτερικού γραναζιού στις διευθύνσεις Υ και Ζ

25
ΕΛΕΓΧΟΣ ΣΕ ΚΑΜΨΗ ΟΔΟΝΤΩΤΩΝ ΤΡΟΧΩΝ ΚΑΤA AGMA

26
ΥΠΟΛΟΓΙΣΜΟΣ ΜΕΓΙΣΤΗΣ ΙΣΧΥΟΣ ΠΟΥ ΔΥΝΑΤΑΙ ΝΑ ΦΕΡΕΙ Ο ΜΗΧΑΝΙΣΜΟΣ ΓΙΑ ΣΤΑΘΕΡΗ ΓΩΝΙΑΚΗ ΤΑΧΥΤΗΤΑ ΠΕΡΙΣΤΡΟΦΗΣ ΤΟΥ ΑΞΟΝΑ ΕΙΣΟΔΟΥ ΣΤΙΣ 1500rpm Η μέγιστη ισχύς είναι: Ρmax = 24.5 Hp = =18.27 kW Η μέγιστη ροπή στην είσοδο είναι: ΜΤmax = kpcm = Nm Η μέγιστη ροπή στην έξοδο υπολογίζεται βάσει της σχέσης μετάδοσης: Mout,max = Min,max * i = * 5.7 = =653.9 Nm

27
ΕΛΕΓΧΟΣ ΣΕ ΕΠIΦΑΝΕΙΑΚΗ ΠΙΕΣΗ ΟΔΟΝΤΩΤΩΝ ΤΡΟΧΩΝ ΚΑΤA AGMA

28
ΣΥΜΠΕΡΑΣΜΑΤΑ Οι πλανητικοί μειωτήρες είναι έξυπνοι μηχανισμοί που συνδυάζουν τη μεγάλη ικανότητα μείωσης στροφών και τους διαφόρους κινηματικούς συνδυασμούς με τις περιορισμένες διαστάσεις του κιβωτίου. Ο πλανητικός μηχανισμός της παρούσης εργασίας έχει λόγο μετάδοσης 5.7 και διαστάσεις 376x290x440 (ΜxΠxΥ) Είναι μηχανισμοί που πολύ αποδοτικοί, αφού η τυπική απώλεια ισχύος είναι 3% σε κάθε στάδιο μείωσης. Αυτό σημαίνει ότι μεγαλύτερο ποσοστό της εισερχόμενης ισχύος εξέρχεται στην έξοδο, χωρίς να εξανεμίζεται στα ενδιάμεσα στάδια. Ένα άλλο πολύ σημαντικό χαρακτηριστικό των πλανητικών μειωτήρων είναι η κατανομή του φορτίου. Επειδή αυτό διανέμεται στους πλανήτες, η ικανότητα παραλαβής μεγαλύτερης ροπής αυξάνεται. Όσοι περισσότεροι είναι οι πλανήτες, τόσο μεγαλύτερη ροπή δύναται να μεταφέρει ο μηχανισμός. Τα μειονεκτήματα των μηχανισμών αυτών έχουν να κάνουν με τα υψηλά φορτία που πρέπει να φέρουν τα έδρανα, τη μειωμένη ικανότητα πρόσβασης στο εσωτερικό τους, αφού είναι πολύ πολύπλοκοι μηχανισμοί και την πολυπλοκότητα στην κατασκευή και στη συναρμολόγηση. Οι πλανητικοί μηχανισμού έχουν ευρεία χρήση σε πολλούς τομείς της βιομηχανίας και χρησιμοποιούνται σε πολλά προϊόντα.
 Είναι μηχανισμοί που πολύ αποδοτικοί, αφού η τυπική απώλεια ισχύος είναι 3% σε κάθε στάδιο μείωσης. Αυτό σημαίνει ότι μεγαλύτερο ποσοστό της εισερχόμενης ισχύος εξέρχεται στην έξοδο, χωρίς να εξανεμίζεται στα ενδιάμεσα στάδια. Ένα άλλο πολύ σημαντικό χαρακτηριστικό των πλανητικών μειωτήρων είναι η κατανομή του φορτίου. Επειδή αυτό διανέμεται στους πλανήτες, η ικανότητα παραλαβής μεγαλύτερης ροπής αυξάνεται. Όσοι περισσότεροι είναι οι πλανήτες, τόσο μεγαλύτερη ροπή δύναται να μεταφέρει ο μηχανισμός. Τα μειονεκτήματα των μηχανισμών αυτών έχουν να κάνουν με τα υψηλά φορτία που πρέπει να φέρουν τα έδρανα, τη μειωμένη ικανότητα πρόσβασης στο εσωτερικό τους, αφού είναι πολύ πολύπλοκοι μηχανισμοί και την πολυπλοκότητα στην κατασκευή και στη συναρμολόγηση. Οι πλανητικοί μηχανισμού έχουν ευρεία χρήση σε πολλούς τομείς της βιομηχανίας και χρησιμοποιούνται σε πολλά προϊόντα.")
29
ΣΑΣ ΕΥΧΑΡΙΣΤΩ ΠΟΛΥ ΓΙΑ ΤΗΝ ΠΡΟΣΟΧΗ ΣΑΣ!!!

35
BACKUP ΔΙΑΦΑΝΕΙΕΣ

36
ΕΙΣΟΔΟΙ ΤΟΥ ΣΥΣΤΗΜΑΤΟΣ: Ισχύς στον άξονα εισόδου: 5kW = 6
ΕΙΣΟΔΟΙ ΤΟΥ ΣΥΣΤΗΜΑΤΟΣ: Ισχύς στον άξονα εισόδου: 5kW = 6.7 hp Αριθμός στροφών στον άξονα εισόδου: 1500 rpm (Min) kpcm = = 71620* = 320 kpcm = Nm Ισορροπία δυνάμεων στο γρανάζι-ήλιος: (Min) kpcm = 3 * Fts * rs → Fts = (Min) kpcm / 3 * rs → Fts = 320 kp*cm / 3 * 3cm → Fts = 35.5 kp = N Frs = Fts tanφ = tan20 = N Fns2 = Fts 2 + Frs2 → Fns2 = → Fn2 = → Fn = Ν Ισορροπία δυνάμεων στον πλανήτη: Fout = 2 * Fts = 2 * = N Mout = 3 * Fout * L = 3 * N * 85.5*10-3 m = 177 Nm
 kpcm = = 71620* = 320 kpcm = Nm. Ισορροπία δυνάμεων στο γρανάζι-ήλιος: (Min) kpcm = 3 * Fts * rs → Fts = (Min) kpcm / 3 * rs → Fts = 320 kp*cm / 3 * 3cm → Fts = 35.5 kp = N. Frs = Fts tanφ = tan20 = N. Fns2 = Fts 2 + Frs2 → Fns2 = → Fn2 = → Fn = Ν. Ισορροπία δυνάμεων στον πλανήτη: Fout = 2 * Fts = 2 * = N. Mout = 3 * Fout * L = 3 * N * 85.5*10-3 m = 177 Nm.")
37
ΔΥΝΑΜΙΚΑ ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ ΕΙΣΟΔΟΥ ΚΑΙ ΕΞΟΔΟΥ
Τα χαρακτηριστικά της εισόδου και εξόδου όπως υπολογίστηκαν αναλυτικά . Ένας άλλος τρόπος υπολογισμού της ροπής στην έξοδο είναι με τη χρήση του λόγου μετάδοσης: Μout = Μin * i = * 5.7 = 179 Nm Για τον προγραμματισμό στο SimDesigner R4WBE θα χρησιμοποιηθεί η τιμή για τη ροπή στην έξοδο ίση με 178 Nm.

38
Μεταφορική ταχύτητα του κέντρου μάζας του κάθε πλανήτη κατά τη μεταβατική φάση εκκίνησης του μηχανισμού σε σχέση με το χρόνο Γωνιακή ταχύτητα περιστροφής του κάθε πλανήτη κατά τη μεταβατική φάση εκκίνησης σε σχέση με το χρόνο

39
Θέση του κέντρου μάζας του κάθε πλανήτη κατά τη μεταβατική φάση εκκίνησης σε σχέση με το χρόνο

Παρόμοιες παρουσιάσεις

>")
















>")
