Κατέβασμα παρουσίασης
1
Ojlerovi uglovi Filip Luković 257/2010 Uroš Jovanović 62 /2010
Boban Piskulić 254 /2010 Jelena Mirkov 108 /2010

2
Ojlerovi uglovi su 3 ugla koja opisuju orijentaciju tela u 3-dimenzionalnom prostoru.
Prvi put ih je predstavio Leonhard Euler, pa su po njemu i dobili ime. On je pokazao da se položaj tela pri obrtanju oko neke nepokretne referentne tačke može jednoznačno odrediti sa 3 ugla.

3
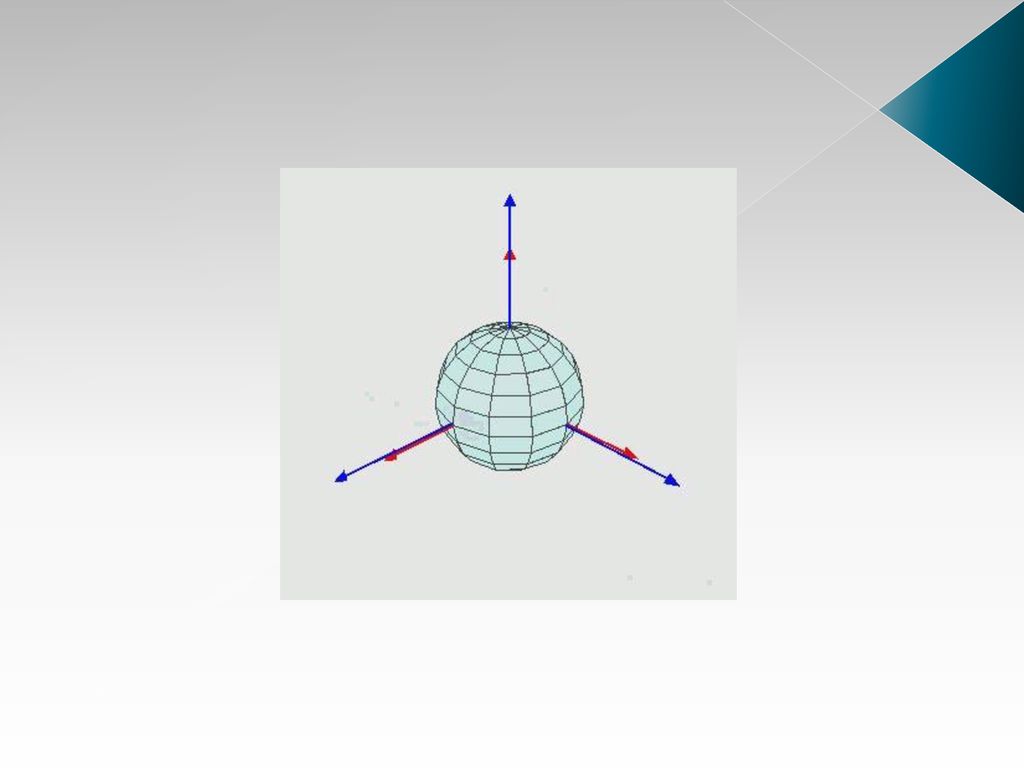
Uzmimo neku nepokretnu tačku O za početak nepokretnog Dekartovog koordinatnog sistema (x, y, z), tada možemo da uvedemo pokretni koordinatni sistem (X, Y, Z) čiji je početak takođe u tački O. Tada će položaj tela pri obrtanju oko neke nepokretne tačke jednoznačno biti određen položajem pokretnog koordinatnog sistema (X, Y, Z) u odnosu na nepokretni (x, y, z). α- rotacija po x koordinati β- rotacija po z koordinati γ- rotacija po y koordinati

4
Ojlerove rotacije Postoji više načina da se pomođu 3 ugla definiše orijentacija jednog koordinatnog sistema u odnosu na drugi, i najčešće korišćeni način u robotici, vazduhoplovstvu i nautici polazi od rotacija oko osa fiksnog koordinatnog sistema. Ojlerova rotacija jeste promena jednog ugla, dok druga dva ostaju nepromenjena.

5
Rotacija oko x-ose- ugao Ψ (ugao skretanja- YAW)
Rotacija oko y-ose- ugao θ (ugao propinjanja- PITCH) Rotacija oko z-ose- ugao Φ (ugao valjanja- ROLL)
 Rotacija oko z-ose- ugao Φ (ugao valjanja- ROLL)")
6
Matrica rotacije oko x-ose Matrica rotacije oko y-ose
Matrica rotacije oko z-ose Matrica rotacije po sve 3 ose

9
Programska implementacija
Ulaz: uglovi rotacije po x,y i z osi (alfa,beta,gama) Izlaz: matrice rotacije i grafički prikaz Algoritam je konstante slozenosti – O(1)
 Izlaz: matrice rotacije i grafički prikaz. Algoritam je konstante slozenosti – O(1)")
10
Unos uglova

11
Generisanje matrice rotacije i zapis u fajl
Unos uglova Generisanje matrice rotacije i zapis u fajl

12
Generisanje matrice rotacije i zapis u fajl Čitanje i dekompozicija
Unos uglova Generisanje matrice rotacije i zapis u fajl Čitanje i dekompozicija

13
Unos uglova Čitanje i dekompozicija Ispis matrica i gr. prikaz
Generisanje matrice rotacije i zapis u fajl Čitanje i dekompozicija Ispis matrica i gr. prikaz

14
Unos uglova Čitanje i dekompozicija Ispis matrica i gr. prikaz
PRVI DEO Generisanje matrice rotacije i zapis u fajl Čitanje i dekompozicija Ispis matrica i gr. prikaz

15
Unos uglova Čitanje i dekompozicija Ispis matrica i gr. prikaz
PRVI DEO Generisanje matrice rotacije i zapis u fajl Čitanje i dekompozicija DRUGI DEO Ispis matrica i gr. prikaz

16
Unos uglova Čitanje i dekompozicija Ispis matrica i gr. prikaz
PRVI DEO Generisanje matrice rotacije i zapis u fajl Čitanje i dekompozicija DRUGI DEO Ispis matrica i gr. prikaz

17
Generisanje matrice double A[9]; cos(β)*cos(γ)
cos(γ)*sin(β)*sin(α) – cos(α)*sin(γ) cos(α)*cos(γ)*sin(β) + sin(α)*sin(γ) cos(β)*sin(γ) sin(β)*sin(α)*sin(γ) + cos(α)*cos(γ) cos(α)*sin(β)*sin(γ) - cos(γ)*sin(α) -sin(β) cos(β)*sin(α) cos(β)*cos(α) α – alfa (rotacija po x) β – beta (rotacija po y) γ – gama (rotacija po z)
![Generisanje matrice double A[9]; cos(β)*cos(γ)](http://slideplayer.gr/slide/14846729/90/images/17/Generisanje+matrice+double+A%5B9%5D%3B+cos%28%CE%B2%29%2Acos%28%CE%B3%29.jpg "cos(γ)*sin(β)*sin(α) – cos(α)*sin(γ) cos(α)*cos(γ)*sin(β) + sin(α)*sin(γ) cos(β)*sin(γ) sin(β)*sin(α)*sin(γ) + cos(α)*cos(γ) cos(α)*sin(β)*sin(γ) - cos(γ)*sin(α) -sin(β) cos(β)*sin(α) cos(β)*cos(α) α – alfa (rotacija po x) β – beta (rotacija po y) γ – gama (rotacija po z)")
18
Unos uglova Čitanje i dekompozicija Ispis matrica i gr. prikaz
PRVI DEO Generisanje matrice rotacije i zapis u fajl Čitanje i dekompozicija DRUGI DEO Ispis matrica i gr. prikaz

19
Čitanje i dekompozicija Ispis matrica i gr. prikaz
DRUGI DEO Ispis matrica i gr. prikaz

20
Čitanje i dekompozicija Ispis matrica i gr. prikaz
DRUGI DEO Ispis matrica i gr. prikaz

21
Čitanje i dekompozicija
double niz[9]; niz[0]=R11; niz[1]=R12; … niz[9]=R33;

22
Čitanje i dekompozicija
U programu: Ψ = alfa θ = beta φ = gama atan2(x,y) = atan(x/y) Pseudo kod algoritma za dekompoziciju
 = atan(x/y) Pseudo kod algoritma za dekompoziciju.")
23
Čitanje i dekompozicija Ispis matrica i gr. prikaz
DRUGI DEO Ispis matrica i gr. prikaz

24
Čitanje i dekompozicija Ispis matrica i gr. prikaz
DRUGI DEO Ispis matrica i gr. prikaz