Κατέβασμα παρουσίασης
Η παρουσίαση φορτώνεται. Παρακαλείστε να περιμένετε

1
تـــرانـــــس ســـــــه فاز
به طور کلی ترانس های سه فاز به دو صورت زیر وجود دارند : گروه ترانس های سه فاز ترانس سه فاز b c توالی مثبت توالی منفی

2
ترانس سه فاز گروه ترانس های سه فاز
ترانس هایی هستند که ذاتا سه فاز طراحی و ساخته شده اند و در آنها بر روی یک هسته بزرگ سیم پیچ های اولیه و ثانویه مربوط به هر فاز بر روی یکی از ساق های هسته پیچیده می شود . گروه ترانس های سه فاز سه ترانس تکفاز کاملا مشابه که در کنار یکدیگر با اتصالات مناسب تبدیل به سه فاز گردد را گروه ترانس های سه فاز گویند . گروه ترانس های سه فاز ازنظر حجم و قیمت بسیار بالاتر از ترانس سه فازبوده ولی هزینه تجهیزات رزوبرای افزایش قابلیت اطمینان شبکه در آن کمتر است و از طرفی در صورت بروز عیب در ترانس تک فاز تنها کافی است ترانـــس مربوط به آن فاز را از مدارخارج کرده یا باجایگزینی رزو تغذیه تداوم یافته و یا حتی با دو ترانس تک فاز و اتصــال مثلث باز تغذیه بخشی از شبکه را تداوم بخشید. (قابلیت اطمینان شبکه بالاتر است) (هزینه بالا)
 (هزینه بالا)")
3
انواع اتصالات سه فاز سه فاز متقارن
اختلاف پتانسیل بین یک فاز با فاز دیگر را ولتاژ خط می نامیم (اگر اسم نیاورد ولتاژ خط در نظر است) اختلاف پتانسیل بین یک فاز و یک نول را ولتاژ فاز می نامیم سرهای نقطه دار ← سرهای ورودی جریان ترانس + Va - Ph سه فاز متقارن Ph - - Vb Vc + + یکی از مزیت های ستاره نول داشتن است (سروسط)
 اختلاف پتانسیل بین یک فاز و یک نول را ولتاژ فاز می نامیم. سرهای نقطه دار ← سرهای ورودی جریان ترانس. + Va. - Ph. سه فاز متقارن. Ph. - - Vb. Vc. + + یکی از مزیت های ستاره نول داشتن است (سروسط)")
4
Va – Vb – Vc ولتاژهای فاز نام دارند و VL ولتاژ خط نام دارد.
Ph سه فاز متقارن Va – Vb – Vc ولتاژهای فاز نام دارند و VL ولتاژ خط نام دارد.

5
- Vb - Va - Vc دیاگرام فازوری هم مرکز

6
دیاگرام فازوری غیر هم مرکز

7
روابط Ph Ph Ph

8
برای اتصال مثلث ابتدا آنها (سه سیم پیچ) را سری کرده (برای اینکار یک سر نقطه دار را به سر بی نقطه وصل می کنیم) سپس سیم پیچ های فاز a و b و c را از سر نقطه دار نام گذاری می کنیم. (نقطه دار به بی نقطه) (این اتصال سر وسط ندارد) ILa ILb ILc a a b Ia Ib Ph Ic c c b
 (این اتصال سر وسط ندارد) ILa. ILb. ILc. a. a. b. Ia. Ib. Ph. Ic. c. c. b.")
9
سه فاز متقارن Ph

10
دیاگرام فازوری هم مرکز

11
دیاگرام فازوری غیر هم مرکز
روابط Ph روابط مثلث شبیه ستاره است

12
انواع اتصالات در ترانس سه فاز
با استفاده از اتصال ستاره و مثلث برای سیم پیچ های اولیه و ثانویه می توان هر یک از این دو نوع را بکار برد لذا، 4 نوع اتصال می توان داشت: اتصال مطلوبی برای شبکه برق نیست (به عنوان کاهنده در انتقال خطوط انتقال)
")
13
مثلث امپدانسی تبدیل اتـصال مثلث به ستاره منبع ولتاژ مثلث مثلث امپدانسی

14
منبع ولتاژ مثلثی

15
تحلیل ترانسفورماتور سه فاز
1- اتصال ستاره-ستاره (با فرض منبع تغذیه و بار سه فاز متقارن ستاره)
")
16
اتصال الکتریکی فرضی بین
با توجه به هم پتانسیل بودن مراکز ستاره ، با در نظر گرفتن اتصال فرضی بین آنها می توان از هر فاز و این اتصال فرضی مدل تکفاز مجزایی مشابه زیر استخراج کرد . اتصال الکتریکی فرضی بین در سه فاز متقارن

17
مدل تکفاز به کمک مدل تک فاز حاصل می توان تحلیل تک فاز انجام داد و نتایج تک فاز حاصل را به سیستم سه فاز ارجاع داد.و در صورت نیاز ضرایب لازم را در آن لحاظ می کنیم.

18
مدل دقیق از دید اولیه

19
- VL1 Vph1 2)اتصال ستاره مثلث + VL2 _ Vph2
اتصال ستاره مثلث + VL2 _ Vph2")
20
مدل تکفاز Vph1 Vph2 نسبت تبدیل در اتصال ستاره – ستاره
جایگزین برای هر فاز Vph1 Vph2 مدل تکفاز

21
مدل تقریبی صرفنظر از هسته

22
1330/220 1330/220 I2 I3 I4 Z2

23
نسبت تبدیل هر ترانس تکفاز در اتصال ستاره مثلث نظیر
: حرارتی : موتوری I3 – I4 Z2 Z1 V1 بارها

24
Z1× 102 Z2

25
نسبت تبدیل ترانس در مدل تکفاز
3)اتصال مثلث ستاره نسبت تبدیل ترانس در مدل تکفاز
اتصال مثلث ستاره. نسبت تبدیل ترانس در مدل تکفاز.")
26
مثلث است و باید به ستاره تبدیل شود
( چون در اولیه است نسبت تبدیل نمی خواهد )
")
27
4)اتصال مثلث –مثلث
اتصال مثلث –مثلث")
28
بر این اساس نسبت تبدیل ترانس در مدل تکفاز با نسبت تبدیل هر ترانس در اتصال مثلث – مثلث برابر بوده ولی دقت شود امپدانس معادل ترانس هر فاز چه از دید اولیه و چه از دید ثانویه لازم است بر 3 تقسیم شود تا امپدانس ستاره آن در مدل تکفاز قابل استفاده کرد.

29
اتصال مثلث –باز ← V-V در گروه های ترانس های سه فاز با آرایش مثلث مثلث اگر در اثر بروز خطا یکی از فازها معیوب گشته و از مدار خارج شود اتصال دو ترانس باقی مانده را اتصال مثلث باز می گوئیم و ثابت می شود این دو ترانس قادر هستند بخشی از بار سه فاز متقارن را کماکان تغذیه کنند. با فرض تغذیه سه فاز سینوسی و حذف ترانس C

30
از طرفی می دانیم ab Vca بدین ترتیب علی رقم حذف ترانس c ولتاژهای خط ثانویه تقارن سه فازی خود را حفظ خواهند کرد. Vab Vbc

31
حداکثر توان قابل تحمل اتصال V-V نسبت به مثـــلث مثــــلث
در بدترین شرایط وقتی ولتاژ و جریان هر یک از سیم پیچ ها نامی باشد حداکثر توان ممکن از ترانس دریافت می شود لذا می توان نوشت ← توان ماکزیمم در مثلث مثلث توان ماکزیمم در مثلث باز

32
انواع میدان های مغناطیسی
2- میدان تپشی 1- میدان ثابت میدانی است که قدرت قطب ها و موقعیت مکانی آنها همواره ثابت می ماند ← استاتور ماشین های DC در این میدان امتداد قطب ها همواره ثابت ولی قدرت میدان با گذشت زمان مرتبا تغییر می کند. مثل ترانس میدانی با قدرت ثابت که قطب های آن با سرعت زاویه ای ثابتω حول محور مرکزی چرخش می کند مانند ماشین های ac سه فاز 3- میدان دوار «اساس کار ماشین های ac بر اساس میدان دوار می باشد»

33
تولید میدان دوار اگر یک آهنربا را حول محورش بچرخانیم تولید میدان دوار می کند اما روش دیگری هم برای ایجاد میدان دوار وجود دارد، 3 سیم پیچ با اختلاف فاز مکانی 120 درجه را بر یک شبکه سه فاز با اختلاف فاز زمانی 120 درجه وصل کنیم. زمان 1 زمان 2 زمان 3 U1 U2 V1 W1 W2 V2 U1 U2 V1 W1 W2 V2 N S N I + S I -

34
ماشین های جریان متناوب 3 فاز بر مبنای این میدان کار می کند و در موتورهای سه فاز میدان دوار به وسیله ی استاتور تولید می شود. نکته ← اگر سرعت رتور در این ماشین ها برابر سرعت میدان دوار باشد آنها را ماشین سنکرون می گوییم و چنانچه سرعت رتور بیشتر یا کمتر از سرعت میدان دوار باشد این نوع ماشین را آسنکرون (القایی) می گویند. در صورتی که میدان دوار استاتور توسط سه سیم پیچ با اختلاف فاز 120 درجه ایجاد شود میدان دوار سرعتش برابر فرکانس شبکه خواهد شد. این میدان فقط دارای یک قطب شمال و یک قطب جنوب است. حال اگر در استاتور به جای 3 سیم پیچ از 6 سیم پیچ که نسبت به یکدیگر 60 درجه اختلاف فاز مکانی پیدا می کنند استفاده کنیم تعداد قطب های میدان دوار دو برابر اما سرعت میدان نصف می شود در نتیجه سرعت میدان دوار تابع فرکانس شبکه و تعداد قطب های سیم پیچی می باشد.قطب های میدان دوار همواره دو تایی بوده ( N و S )از این جهت سرعت میدان مدار برمبنای تعداد جفت قطب ها محاسبه می شود.
 می گویند. در صورتی که میدان دوار استاتور توسط سه سیم پیچ با اختلاف فاز 120 درجه ایجاد شود میدان دوار سرعتش برابر فرکانس شبکه خواهد شد. این میدان فقط دارای یک قطب شمال و یک قطب جنوب است. حال اگر در استاتور به جای 3 سیم پیچ از 6 سیم پیچ که نسبت به یکدیگر 60 درجه اختلاف فاز مکانی پیدا می کنند استفاده کنیم تعداد قطب های میدان دوار دو برابر اما سرعت میدان نصف می شود در نتیجه سرعت میدان دوار تابع فرکانس شبکه و تعداد قطب های سیم پیچی می باشد.قطب های میدان دوار همواره دو تایی بوده ( N و S )از این جهت سرعت میدان مدار برمبنای تعداد جفت قطب ها محاسبه می شود.")
35
ماشین آسنکرون (القــایی 3 فاز)
60 جهت گردش میدان دوار اگر میدان دواردر جهت عقربه های ساعت حرکت کند آن را راستگرد و خلاف آن را چپگرد می نامیم.با جابجائی اتصال دو فاز از سه فاز منبع تغذیه می توان جهت گردش میدان دوار را تغییر داد . تعداد جفت قطب ماشین آسنکرون (القــایی 3 فاز) اجزاء ماشین شامل : 1)ساکن (استاتور) 2)متـــحرک(رتور) استاتور شامل : پوسته، هسته مغناطیسی و شیارها، سیم پیچی، یاتاقان ها و غیره روتور شامل : شافت ماشین، هسته مغناطیسی ، سیم پیچی ، میله ، فن
 اجزاء ماشین شامل : 1)ساکن (استاتور) 2)متـــحرک(رتور) استاتور شامل : پوسته، هسته مغناطیسی و شیارها، سیم پیچی، یاتاقان ها و غیره. روتور شامل : شافت ماشین، هسته مغناطیسی ، سیم پیچی ، میله ، فن.")
36
استاتور ماشین القایی حالت اول : سیم بندی متمرکز
وظیفه ی اصلی استاتور آن است که با دریافت تغذیه ای سه فاز متقارن سینوسی میدانی دوار درون ماشین ایجاد کرده تا به واسطه ی آن تبدیل انرژی حاصل شود. حالت اول : سیم بندی متمرکز U1 U2 V2 W2 در این نوع سیم بندی برای هر فاز تغذیه دو شیار و دو کلاف سیم پیچی یکی برای نصف جریان و دیگری برای برگشت جریان در نظر گرفته شده به گونه ای که محور مغناطیسی سه فاز a و b و c دارای تقارن سه فازی باشد .

37
حالت دوم : سیم بندی متقارن پخش سینوسی
با فرض تعداد دور مشابه برای سه فاز ← و با فرض تغدیه متقارن سه فاز سینوسی حالت دوم : سیم بندی متقارن پخش سینوسی در این نوع سیم بندی بر روی محیط استاتور بی نهایت شیار فرض کرده که در هر شیار برای هر سه فاز a و b و c سیم پیچی با تعداد دور مشخص و متفاوت وجود داشته به طوری که مجموع کل سیم های شیارها با هم برابر باشد. در این نوع سیم بندی محور فاز a محیط استاتور را به دو نیمه تفکیک کرده و جهت جریان سیم های فاز a در دو نیمه متفاوت می باشد. از طرفی تعداد دور سیم ها برای فاز a از کمترین مقدار روی محورمغناطیسی این فاز شروع شده و در امتداد عمود بر محور مغناطیسی به حداکثر مقدار خود می رسد.

38
جمع سه COS با اختلاف فاز 120 درجه برابر صفر
هر نقطه از محیط استاتور ، میدان طپشی است و طپش آن در جاهای مختلف متفاوت است . F = Fa + Fb +Fcکل [ COS (θ-ωt) – COS (θ+ωt) + COS (θ-ωt) – COS (θ+ωt-240) + COS (θ-ωt) - COS (θ+ωt+240)] جمع سه COS با اختلاف فاز 120 درجه برابر صفر
 – COS (θ+ωt) + COS (θ-ωt) – COS (θ+ωt-240) + COS (θ-ωt) - COS (θ+ωt+240)] جمع سه COS با اختلاف فاز 120 درجه برابر صفر.")
39
اصول تولید گشتاور پایدار در ماشین های الکتـریکی دوار
وظیفه ی اصلی ماشین های الکتریکی دوار تبدیل انرژی الکتریکی به مکانیکی می باشد که لازمه این تبدیل وجود گشتاوری پایدار در ماشین است این گشتاور در صورت وجود 4 شرط حاصل می گردد. 1)وجود دو میدان مغناطیسی (میدان های استاتور و رتور) 2)دو میدان نسبت به یکدیگر ساکن 3)تعداد قطب های مغناطیسی برابر برای دو میدان 4)محورهای دو میدان در یک امتداد نباشد.
وجود دو میدان مغناطیسی (میدان های استاتور و رتور) 2)دو میدان نسبت به یکدیگر ساکن. 3)تعداد قطب های مغناطیسی برابر برای دو میدان. 4)محورهای دو میدان در یک امتداد نباشد.")
40
ساختـار رتـور ماشین القایی
وظیفه ی رتور در ماشین القایی ایجاد یک میدان مغناطیسی با تعداد قطب مشابه میدان استاتور از نوع دوار با سرعتی مشابه سرعت میدان استاتور می باشد که به واسطه ی آن شرایط ایجاد گشتاور پایدار در ماشین فراهم می شود با توجه به تشابه زیاد میدان رتور به میدان استاتور در ماشین ها القایی میدان رتور توسط خود استاتور ایجاد می شود. 1) رتور سیم پیچی شده در این نوع رتور بر روی محیط استوانه ای رتور شیارهای فراوانی وجود دارد که سیم بندی کاملا مشابهی با استاتور در این شیارها پیاده سازی می شود و در نهایت سرهای سیم پیچ های هر فاز با یکدیگر اتصال کوتاه می شود ، با تغذیه استاتور و شکل گیری میدان استاتور با فرض آنکه رتور ساکن باشد درون سیم پیچ های فازهای رتور تغییر شار ایجاد می شود و لذا ولتاژ القا شده و از آنجایی که سیم پیچ های رتور هم با یکدیگر 120 درجه اختلاف فاز مکانی دارند ولتاژهای القا شده در آنها نیز اگر چه از لحاظ اندازه برابر است ولی اختلاف فاز 120 درجه خواهد داشت
 رتور سیم پیچی شده. در این نوع رتور بر روی محیط استوانه ای رتور شیارهای فراوانی وجود دارد که سیم بندی کاملا مشابهی با استاتور در این شیارها پیاده سازی می شود و در نهایت سرهای سیم پیچ های هر فاز با یکدیگر اتصال کوتاه می شود ، با تغذیه استاتور و شکل گیری میدان استاتور با فرض آنکه رتور ساکن باشد درون سیم پیچ های فازهای رتور تغییر شار ایجاد می شود و لذا ولتاژ القا شده و از آنجایی که سیم پیچ های رتور هم با یکدیگر 120 درجه اختلاف فاز مکانی دارند ولتاژهای القا شده در آنها نیز اگر چه از لحاظ اندازه برابر است ولی اختلاف فاز 120 درجه خواهد داشت.")
41
بدین ترتیب ولتاژهای سه فاز متقارنی در سیم پیچ های رتور ایجاد می شود
بدین ترتیب ولتاژهای سه فاز متقارنی در سیم پیچ های رتور ایجاد می شود.با توجه به اتصال کوتاه بودن سیم پیچ ها این ولتاژ القایی باعث جاری شدن جریانی می شود که در سه فاز به صورت متقارن سینوسی جاری می شود لذا بدین ترتیب سیم پیچی پخش شده متقارن سینوسی رتور همراه با جریان سه فاز متقارن القایی ایجاد میدان دوار رتور راخواهد نمود. 2)رتور قفس سنجابی در این نوع رتور بر روی محیط هسته مغناطیسی روتور شیارهایی زیادی ایجاد کرده که درون آنها از جنس رسانایی مذابی (معمولا آلومینیم) تزریق گشته تا میله های رتور شکل گیرد ،این میله ها از دو طرف توسط حلقه های اتصال کوتاه به یکدیگر مرتبط می گردند تا بدین ترتیب بی شمار حلقه ی متشکل از دو میله ی دلخواه و بخش های واسط ایجاد شده که استاتور به واسطه ی میدان خود می تواند در هر یک از آنها به هر مقدار دلخواه القا داشته که نتیجه ی آن میدانی خواهد بود مشابه میدان استاتور . این نوع رتور بسیار ارزان تر و کم حجم تر از رتور سیم پیچی بوده و تنها مشکل عمده آن عدم دسترسی به رتور می باشد.
رتور قفس سنجابی. در این نوع رتور بر روی محیط هسته مغناطیسی روتور شیارهایی زیادی ایجاد کرده که درون آنها از جنس رسانایی مذابی (معمولا آلومینیم) تزریق گشته تا میله های رتور شکل گیرد ،این میله ها از دو طرف توسط حلقه های اتصال کوتاه به یکدیگر مرتبط می گردند تا بدین ترتیب بی شمار حلقه ی متشکل از دو میله ی دلخواه و بخش های واسط ایجاد شده که استاتور به واسطه ی میدان خود می تواند در هر یک از آنها به هر مقدار دلخواه القا داشته که نتیجه ی آن میدانی خواهد بود مشابه میدان استاتور . این نوع رتور بسیار ارزان تر و کم حجم تر از رتور سیم پیچی بوده و تنها مشکل عمده آن عدم دسترسی به رتور می باشد.")
42
مفهوم زاویه الکتریکی و زاویه مکانیکی
زاویـه مکانیکی همان زاویه ی هندسی است که یک دور آن معادل 360 درجه می باشد. ولی یک دور کامل زاویه ای الکتریکی یعنی 360 درجـــه الکتریکی با چرخش از یک موقعیت میدان تا موقعیت مشابه از میدان رقم خورده که می تواند با زاویه مکانیکی متفاوت باشد. N سیستم 2 قطب سیستم4 قطب سیستمP قطب 180 m = 360 e Θm = θe مفهوم سرعت مکانیکی و الکتریکی سرعت مکانیکی زاویه مکانیکی طی شده در یک ثانیه است و سرعت الکتریکی زاویه الکتریکی طی شده در یک ثانیه می باشد.به عبارت دیگر سرعت مکانیکی همان سرعت چرخش است ولی سرعت الکتریکی سرعت تغییر میدان می باشد. سرعت الکتریکی تذکر : برخی از سرعت ها ذاتا مکانیکی (مانند چرخش محور یک ماشین)و برخی ذاتا الکتریکی (مانند چرخش میدان دوار) می باشند. سرعت مکانیکی
و برخی ذاتا الکتریکی (مانند چرخش میدان دوار) می باشند. سرعت مکانیکی.")
43
اصـــول عملکرد ماشـین های القایی(موتوری)
اگر استاتور یک ماشین القایی با سیم بندی پخش شده متقارن سینوسی را با یک منبع سه فاز متقارن تغذیه کنیم میدان دوار استاتور با سرعت سنکرون الکتریکی ωe = 2πfs ( سرعت چرخش میدان دوار استاتور ) بوجود آمده و با فرض آنکه روتور با سرعت الکتریکی ωer در جهت میدان استاتور بچرخد می توان گفت : 1)تغـذیه 3 فاز متقارن برای استاتور با سیم بندی سه فاز متقارن سینــوسی 6) سرعت میدان دوار روتور نسبت به ناظر ساکن (ωe – ωer) + ωer = ωe
 بوجود آمده و با فرض آنکه روتور با سرعت الکتریکی ωer در جهت میدان استاتور بچرخد می توان گفت : 1)تغـذیه 3 فاز متقارن برای استاتور با سیم بندی سه فاز متقارن سینــوسی. 6) سرعت میدان دوار روتور نسبت به ناظر ساکن (ωe – ωer) + ωer = ωe.")
44
1- موتوری حالـــــت های مختلف عملکرد ماشـین القایی 1- مــوتوری
2- ترمـــزی 3- ژنراتوری حالـــــت های مختلف عملکرد ماشـین القایی 1- موتوری

45
2- ترمزی اگر رتوری به صورت راست گرد در چرخش باشد و بخواهیم سریعا آن را متوقف کنیم کافی است جای دو فاز استاتور را عوض کرده تا بدین ترتیب میدان دوار استاتور که قبلا راست گرد بوده چپ گرد شود بدین ترتیب این میدان چپ گرد گشتاوری مقاوم برای حرکت راستگرد موتور ایجاد کرده و آن را متوقف می سازد . به این دوره کاری موتور حالت ترمزی گفته می شود. واضح است اگر تغذیه معکوس استاتور تداوم داشته باشد موتور پس از توقف به صورت چپ گرد خواهد چرخید. 3- ژنراتو ری Fr Fs

46
مفهوم لغزش به اختلاف نسبی سرعت چرخـش رتور و سرعت میدان استاتور اصطلاحا لغزش گفته می شود. سرعت سنکرون الکتریکی← سرعت سنکرون مکانیکی←

47
1- موتوری مثال : Fs = 50HZ لغزش در شرایط کار مختلف ماشین
ماشین 2 قطب← مثال : Fs = 50HZ ماشین 4 قطبی← ماشین 6 قطب← لغزش در شرایط کار مختلف ماشین 1- موتوری 0 ≤ ωer < ωe ωer = S = 1 روتور ساکن 0 < S ≤ 1 ωer ωe S = 0

48
2- ترمزی با تعویض دو فاز استاتور و تغییر جهت دادن میدان استاتور سرعت نسبی چرخش رتور نسبت به این میدان از جمع سرعت آنها حاصل می شود. در نتیجه می توان گفت: در شرایط ترمزی سرعت رتور کاهش یافته تا به صفر برسد لذا لغزش از یک مقدار حداکثری بین 1 و 2 در لحظه شروع ترمز آغاز شده و سریعا به یک می رسد. در شرایط کار ژنراتور لازم است روتور را توسط یک محرک مکانیکی با سرعت بالاتر از سرعت سنکرون بچرخانیم در نتیجه میدان رتور از میدان استاتور جلو افتاده و گشتاور منفی می شود. 3- ژنراتو ری

49
فرکانس برق القایی رتور در حالت موتوری و ترمزی
1- موتوری سرعت نسبی سیم پیچ روتور نسبت به میدان دوار استاتور فرکانس زاویه ای برق القایی در روتور fr = S fs ازآنجا که در شرایط کار موتوری معمولا سرعت نزدیک به سنکرون و لغزش بسیار کوچک است فرکانس رتور بسیار کمتر از استاتور بوده لذا تلفات هسته رتور به شدت کاهش می یابد بنابراین رتور ماشین القایی نیاز به ورقه ورقه شدن ندارد.

50
استفاده از ماشین القایی به عنوان مبدل فرکانس
2- ترمزی fr = S fs استفاده از ماشین القایی به عنوان مبدل فرکانس اگر استاتور با فرکانس fs تغذیه شده و سرهای سیم پیچ رتور را باز بگزاریم علی رقم القا ولتاژ در سیم پیچ های رتور جریانی جاری نشده و لذا رتور میدانی ایجاد نمیکند و در نتیجه روتور نمیچرخد. درشرایط سکون ولتاژ القایی در رتور فرکانسی برابر با fs دارد. اکنون اگر توسط یک عامل خارجی محور این ماشین درجهت و یا خلاف جهت میدان استاتور چرخانده شود فرکانس ولتاژ القایی بصورت زیر تغییر میکند: 1)چرخش محور در جهت میدان استاتور با سرعت کمتر از سرعت سنکرون (حالت موتوری)
چرخش محور در جهت میدان استاتور با سرعت کمتر از سرعت سنکرون (حالت موتوری)")
51
الف) رتور ساکن ← عملکرد ماشین با رتور ساکن مشابه ترانس است
2)چرخش محور در خلاف جهت میدان استاتور (ترمزی) با این تفاوت که میتواند سرعت چرخش بیش از سرعت سنکرون باشد. رتور ثابت ← عملکرد ماشین با رتور ساکن مشابه ترانس است مدل ســـازی موتـور القایی رتور در حال چرخش ← عدم برابری فرکانس های استاتور و رتور الف) رتور ساکن ← عملکرد ماشین با رتور ساکن مشابه ترانس است اولیه معادل استاتور و ثانویه معادل روتور، تنها تفاوت آنها این است که در ماشین شار ایجاد مغناطیسی به ناچار لازم است از فاصله هوایی بین استاتور و رتور گذشته تا به سیم پیچ های روتور برسد.در نتیجه رلوکتانس مغناطیس کنندگی هسته در ماشین بسیار بزرگتر از ترانس بوده در نتیجه اندوکتانس مغناطیس کنندگی ماشین بسیار کوچکتر از ترانس می شود به همین اساس جریان تحریک ماشین (جریان مغناطیس کننده هسته) بسیار بزرگتر از جریان تحریک ترانس می باشد.
چرخش محور در خلاف جهت میدان استاتور (ترمزی) با این تفاوت که میتواند سرعت چرخش بیش از سرعت سنکرون باشد. رتور ثابت ← عملکرد ماشین با رتور ساکن مشابه ترانس است. مدل ســـازی موتـور القایی. رتور در حال چرخش ← عدم برابری فرکانس های استاتور و رتور. الف) رتور ساکن ← عملکرد ماشین با رتور ساکن مشابه ترانس است. اولیه معادل استاتور و ثانویه معادل روتور، تنها تفاوت آنها این است که در ماشین شار ایجاد مغناطیسی به ناچار لازم است از فاصله هوایی بین استاتور و رتور گذشته تا به سیم پیچ های روتور برسد.در نتیجه رلوکتانس مغناطیس کنندگی هسته در ماشین بسیار بزرگتر از ترانس بوده در نتیجه اندوکتانس مغناطیس کنندگی ماشین بسیار کوچکتر از ترانس می شود به همین اساس جریان تحریک ماشین (جریان مغناطیس کننده هسته) بسیار بزرگتر از جریان تحریک ترانس می باشد.")
52
ب) رتور در حال چرخش مهم ترین تفاوت ماشین در این حالت با ترانس عدم برابری فرکانس های استاتور و رتور می باشد. مدل تکفاز شبیه ترانس در مدل تکفاز اخیر سیم پیچ های یک فاز استاتور و روتور که با یکدیگر تزویج مغناطیسی دارند تحت عنوان شبه ترانس در نظر گرفته شده اند و می توان برای باز نمودن مدل الکتریکی برای سیم پیچ های استاتور و روتور مقاومت اهمی و اندوکتانس پراکندگی در نظر گرفته و برای مدل نمودن رفتار هسته نیز از اندوکتانس مغناطیس کننده همراه مقاومت اتلاف انرژی بهره گرفت .

53
در مدلسازی موتور القایی به خاطر پایین بودن فرکانس مدار روتور تلفات هسته ناچیز بوده و معمولا از مقاومت Rc در مدل صرفنظر می شود . هر سلف با فرکانس مربوط اعمال شود

54
رفتار شبه ترانس ایده آل:
نسبت ولتاژ: نسبت جریان: مدار معادل مغناطیسی رسم می کنیم . Rm =Rg = 0 در حالت ایده آل برای بینهایت شدن شار Ns Is = Nr Ir شبیه ترانس

55
ارجاع اجزاء از سمت روتور سبه ترانس به سمت استاتور
1 ) ارجاع ولتاژ: 2) ارجاع جریان : 3) ارجاع امپدانس: دقت شود در اینجا R/r و L/lr ارجاع یافته شبه ترانسی نیست ، بلکه مقادیر ارجاع یافته در سیستم ترانسی می باشد و بعدا ثابت می کنیم که فرم امپدانس روتور در سمت استاتور چه باید باشد .
 ارجاع ولتاژ: 2) ارجاع جریان : 3) ارجاع امپدانس: دقت شود در اینجا R/r و L/lr ارجاع یافته شبه ترانسی نیست ، بلکه مقادیر ارجاع یافته در سیستم ترانسی می باشد و بعدا ثابت می کنیم که فرم امپدانس روتور در سمت استاتور چه باید باشد .")
56
معیار انتقال اجزاء روتور به سمت استاتور
مدار معادل ماشین القایی از دید استاتور معیار انتقال اجزاء روتور به سمت استاتور

57
الف) حالت موتوری تحلیل عملکرد ماشین بر اساس مدار معادل Es = Er
مقاومت اهمی مقاومت تبدیل انرژی Es = Er Pg تحلیل عملکرد ماشین بر اساس مدار معادل Is Ir الف) حالت موتوری Ie مدار معادل تکفاز
 حالت موتوری. Ie. مدار معادل تکفاز.")
58
دیاگرام توزیع توان سه فاز
فاصله هوایی توان مقاومت تبدیل انرژی دیاگرام توزیع توان سه فاز Pg Pm توان مکانیکی خروجی Pm = (1-S ) Pg
 Pg.")
59
آزمایش های ماشین القایی
ب)حالت ژنراتوری در حالت ژنراتوری محرک مکانیکی با تزریق توان اکتیو از طریق مقاومت تبدیل انرژی به ماشین می تواند پس از جبران تلفات چرخشی و مسی ماشین ، مابقی توان اکتیو تولیدی را به بار یا شبکه موجود تحویل نماید.لازم به ذکر است که ژنراتور القایی برای تامین توان راکتیو مورد نیاز برای اندوکتانس های نشتی و مغناطیس کنندگی نیاز به توان راکتیو داشته که این توان را از شبکه دریافت می کند و در صورت عدم ارتباط با شبکه حتما نیاز به خازن برای تامین توان راکتیو خود دارد. آزمایش های ماشین القایی توسط سه آزمایش ساده زیر می توان با انجام محاسبات مناسب به مقادیر پارامترهای مدار معادل ماشین دست یافت. 1)آزمایش DC در این آزمایش به کمک اهم متر یا روش ولت آمپری DC مقاومت اهمی سیم پیچ هر فاز استاتور به دست می آید . الف)6 سر خروجی: S مقاومت اهمی هر فاز استاتور
حالت ژنراتوری. در حالت ژنراتوری محرک مکانیکی با تزریق توان اکتیو از طریق مقاومت تبدیل انرژی به ماشین می تواند پس از جبران تلفات چرخشی و مسی ماشین ، مابقی توان اکتیو تولیدی را به بار یا شبکه موجود تحویل نماید.لازم به ذکر است که ژنراتور القایی برای تامین توان راکتیو مورد نیاز برای اندوکتانس های نشتی و مغناطیس کنندگی نیاز به توان راکتیو داشته که این توان را از شبکه دریافت می کند و در صورت عدم ارتباط با شبکه حتما نیاز به خازن برای تامین توان راکتیو خود دارد. آزمایش های ماشین القایی. توسط سه آزمایش ساده زیر می توان با انجام محاسبات مناسب به مقادیر پارامترهای مدار معادل ماشین دست یافت. 1)آزمایش DC. در این آزمایش به کمک اهم متر یا روش ولت آمپری DC مقاومت اهمی سیم پیچ هر فاز استاتور به دست می آید . الف)6 سر خروجی: S. مقاومت اهمی هر فاز استاتور.")
60
2) آزمایش بی باری ←NLT ب)3 سر خروجی: ب)مثلث a) ستاره
S 2) آزمایش بی باری ←NLT در این آزمایش محور ماشین آزاد گذاشته شده و استاتور با تجهیزات اندازه گیری ولتاژ و جریان و توان تجهیز شده و به تغذیه نامی وصل می شود. در این شرایط موتور آزادانه با بیشترین سرعت ممکن خواهد چرخید و لذا لغزش بسیار کوچک می باشد. از آنجا که لغزش بسیار کوچک است امپدانس شاخه رتور در این آزمایش بسیار بزرگ بوده لذا می توان از این امپدانس در برابر امپدانس هسته (در اتصال موازی) صرف نظر نمود. در نتیجه خواهیم داشت.
 آزمایش بی باری ←NLT. در این آزمایش محور ماشین آزاد گذاشته شده و استاتور با تجهیزات اندازه گیری ولتاژ و جریان و توان تجهیز شده و به تغذیه نامی وصل می شود. در این شرایط موتور آزادانه با بیشترین سرعت ممکن خواهد چرخید و لذا لغزش بسیار کوچک می باشد. از آنجا که لغزش بسیار کوچک است امپدانس شاخه رتور در این آزمایش بسیار بزرگ بوده لذا می توان از این امپدانس در برابر امپدانس هسته (در اتصال موازی) صرف نظر نمود. در نتیجه خواهیم داشت.")
61
3)آزمایش رتور قفل شده (BRT)
Inl J XLs J Xm Vnl رابطه 1 مقاومت مدل کننده تلفات چرخشی NL رابطه 2 3)آزمایش رتور قفل شده (BRT) در این آزمایش اجازه ی چرخش از رتور گرفته شده و لذا لغزش همواره درطول این آزمایش برابر یک است.در این شرایط استاتور را با منبعی با فرکانس f/s و ولتاژی قابل تنظیم تغذیه کرده و وسایل اندازه گیری نیز نصب میکنیم. سپس ولتاژ تغذیه را از صفر به آرامی بالا برده تا جایی که جریان استاتور به مقدار نامی خود برسد. در این شرایط مقادیر دستگاه های اندازه گیری قرائت و با VBR و IBR و PBR نمایش داده می شود.
آزمایش رتور قفل شده (BRT) در این آزمایش اجازه ی چرخش از رتور گرفته شده و لذا لغزش همواره درطول این آزمایش برابر یک است.در این شرایط استاتور را با منبعی با فرکانس f/s و ولتاژی قابل تنظیم تغذیه کرده و وسایل اندازه گیری نیز نصب میکنیم. سپس ولتاژ تغذیه را از صفر به آرامی بالا برده تا جایی که جریان استاتور به مقدار نامی خود برسد. در این شرایط مقادیر دستگاه های اندازه گیری قرائت و با VBR و IBR و PBR نمایش داده می شود.")
62
= (Rs + R/r ) + J (Xls +X/lr)
از آنجا که در این آزمایش لغزش برابر یک میباشد و امپدانس شاخه ی رتور بسیار کوچک میشود این بار از امپدانس بزرگ هسته در برابر امپدانس کوچک روتور صرف نظر میکنیم. Rs J XLs PBR = 3 ( Rs + R/r )IBR2 Rr R/r = رابطه 3 VBR fs J XLr = (Rs + R/r ) + J (Xls +X/lr) X/BR ZBRφ
IBR2. Rr. R/r = رابطه 3. VBR. fs. J XLr. = (Rs + R/r ) + J (Xls +X/lr) X/BR. ZBRφ.")
63
رابطه 4 مراحل انجام محاسبات مثال : یک ماشین القایی سه فاز V – 60HZ – 6 قطب با قدرت 60 اسب بخار دارای نتایج آزمایش ها به شرح زیر است .مدار معادل آن را پیدا کنید . NLT BRT

64
NL PBR = 3 ( Rs + R/r )IBR2
IBR2")
65
مدار معادل تونن موتور القایی
T ولتاژ مدار باز

66
گشتاور تولیدی موتور القایی
بر اساس رابطه ی اخیر گشتاور ماشین القایی علاوه بر وابستگی به ثابت های ماشین به لغزش و ولتاژ تغذیه هم بستگی دارد.

67
مشخصه گشتاور سرعت موتور القایی
سرعت سنکرون – گشتاور صفر است

68
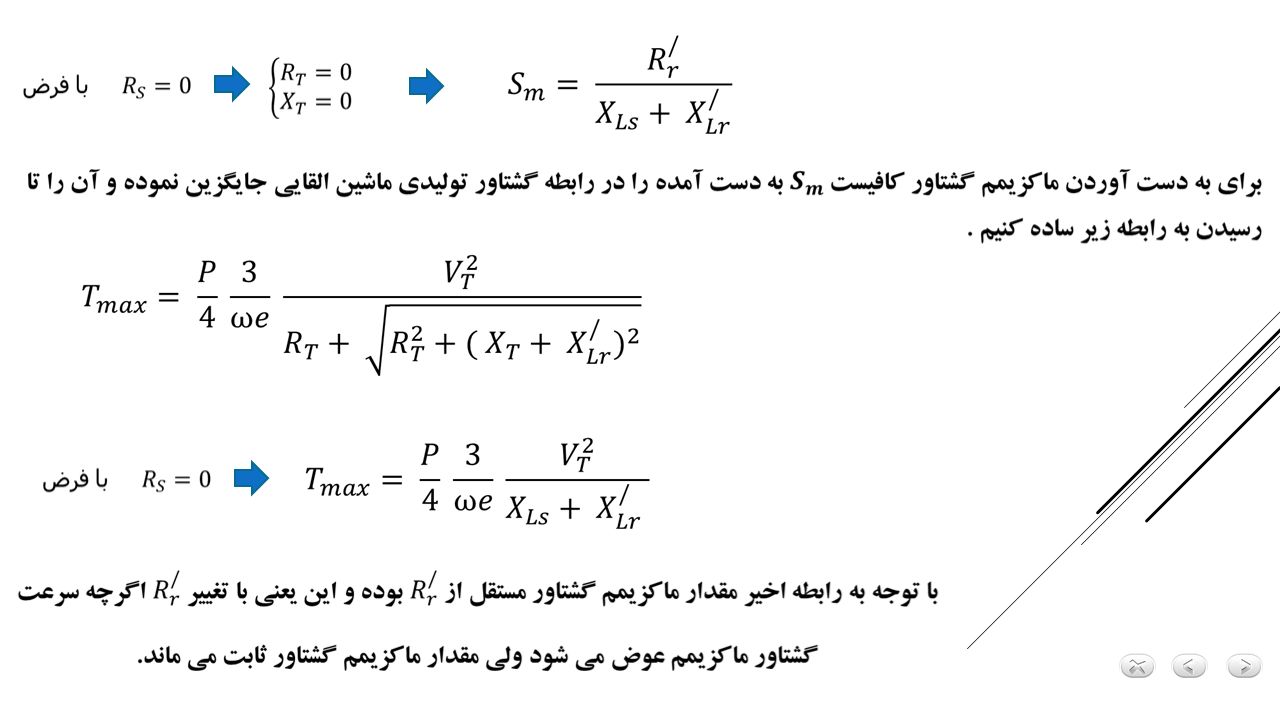
گشتاور ماکزیمم و سرعت مربوط به آن
با توجه به رابطه زیر برای ماکزیمم شدن گشتاور لازم است Pg حداکثر مقدار خود را داشته باشد به عبارت دیگر باید حداکثر توان از مدل تونن دریافت شود لذا باید امپدانس روتور مزدوج مختلط امپدانس تونن باشد . cte cte

70
گشتاور راه اندازی برابر گشتاور ماکزیمم شود
کنترل مشخصه گشتاور سرعت موتور القایی با تغییر مقاومت مدار روتور مقاومت موثر هر فاز روتور گشتاور راه اندازی برابر گشتاور ماکزیمم شود

71
بررسی پایداری نقطه کار موتور القایی
بررسی پایداری 1 بررسی پایداری 2 به طور کلی نقطه کار پایدار موتورهای القایی معمولا در قسمت نزولی مشخصه گشتاور سرعت موتور ایجاد می شود.

72
مقایسه گشتاورها در موتور القایی
نسبت گشتاور کار به گشتاور راه اندازی اگر موتور القایی به ازای نقطه کار دلخواهی دارای گشتاور T و لغزش S بوده و گشتـاور راه انــدازی نیز کـه در لغزش واحد به دست می آید ، برابر Ts باشد می توان اثبات نمود : نسبت گشتاور کار به گشتاور بحرانی مجددا نقطه کار دلخواه با گشتاور T و لغزش S را در نظر گرفته آن را با نقطه کار بحرانی با لغزش Sm و گشتاور Tm مقایسه می کنیم اثبات می شود : نسبت گشتاور راه اندازی به گشتاور بحرانی

73
استاد راهنما : گرد آورندگان:
یوسف کاظمی گرد آورندگان: احسان یزدانی محمد چمن پیرا

Παρόμοιες παρουσιάσεις


 Advanced Linear Programming Lecture 5>")




>")











