Κατέβασμα παρουσίασης
Η παρουσίαση φορτώνεται. Παρακαλείστε να περιμένετε

1
ΠΤΥΧΙΑΚΗ ΕΡΓΑΣΙΑ Σχεδίαση ενός βραχίονα SCARA χρησιμοποιώντας LEGO Mindstorms NXT και MATLAB
Φλώρου Παγώνα ΑΜ : 1570 Επιβλέπων Καθηγητής : Δρ. Βολογιαννίδης Σταύρος

2
Στόχος της Πτυχιακής Συναρμολόγηση ενός βραχίονα SCARA χρησιμοποιώντας την πλατφόρμα NXT Lego. Εισαγωγή στον προγραμματισμό των Lego μέσω Simulink. Τεκμηρίωση του προγράμματος ελέγχου του βραχίονα. Αλλαγή της τροχιάς του βραχίονα.

3
Βραχίονες Οι ρομποτικοί βραχίονες αποτελούνται από μια σειρά διαδοχικών στερεών σωμάτων που ονομάζονται σύνδεσμοι. Οι αρθρώσεις μπορεί να είναι : Πρισματικές : σχετική μεταφορική κίνηση μεταξύ δύο διαδοχικών συνδέσμων Περιστροφικές : υλοποιούν σχετική περιστροφική κίνηση μεταξύ δύο διαδοχικών συνδέσμων Σφαιρικές : υλοποιούν σφαιρική περιστροφική κίνηση μεταξύ δύο διαδοχικών συνδέσμων

4
Βραχίονας SCARA Η γεωμετρία SCARA είναι ειδική και περιλαμβάνει δύο περιστροφικές και μία πρισματική άρθρωση τοποθετημένες κατά τέτοιο τρόπο ώστε οι άξονες κίνησης να είναι παράλληλοι μεταξύ τους. Το όνομα SCARA προέρχεται από τα αρχικά των λέξεων Selective Compliance Assembly Robot Arm. Παρέχει μεγάλη δυσκαμψία σε κατακόρυφη φόρτιση και ελαστικότητα σε οριζόντια. Βραχίονας SCARA

5
Αντίστροφη Κινηματική
Η κινηματική ανάλυση ενός βραχίονα αφορά την επίλυση δύο προβλημάτων που ονομάζονται ευθύ και αντίστροφο κινηματικό πρόβλημα. Το ευθύ κινηματικό πρόβλημα συνίσταται στην εύρεση της θέσης και του προσανατολισμού του άκρου του βραχίονα ως προς τη βάση του όταν γνωρίζουμε τη θέση κάθε άρθρωσης. Το αντίστροφο κινηματικό πρόβλημα συνίσταται στην εύρεση της θέσης της κάθε άρθρωσης που τοποθετεί το άκρο του βραχίονα σε μία συγκεκριμένη (επιθυμητή) θέση και προσανατολισμό σε σχέση με τη βάση του. Ο βαθμός δυσκολίας επίλυσης των προβλημάτων αυτών εξαρτάται από τη γεωμετρία του βραχίονα.
 θέση και προσανατολισμό σε σχέση με τη βάση του. Ο βαθμός δυσκολίας επίλυσης των προβλημάτων αυτών εξαρτάται από τη γεωμετρία του βραχίονα.")
6
Η λύση του αντίστροφου κινηματικού προβλήματος μπορεί να είναι ή να μην είναι μοναδική. Και αυτό γιατί ο βραχίονας μπορεί να κάνει δύο ειδών περιστροφικές κινήσεις

7
Εισαγωγή στα Lego Mindstorm
Τα Lego Mindstorms NXT είναι τα γνωστά τουβλάκια Lego με προηγμένες δυνατότητες όπως κίνηση, προγραμματισμό και επικοινωνία με υπολογιστή. Είναι ένα προϊον της Lego που συνδυάζει προγραμματίσημα τούβλα με ηλεκτρικές μηχανές, αισθητήρες, τούβλα Lego, και τεχνικά κομμάτια Lego (όπως εργαλεία, άξονες, ακτίνες, και υδραυλικά μέρη) κατάλληλα για να χτίσει ο χρήστης ρομπότ και άλλα αυτοματοποιημένα ή διαλογικά συστήματα.
 κατάλληλα για να χτίσει ο χρήστης ρομπότ και άλλα αυτοματοποιημένα ή διαλογικά συστήματα.")
8
Εισαγωγή στον προγραμματισμό των Lego μέσω Simulink
Παράγει C κώδικα Κάνει compile Φορτώνεται στο Lego οπού έπειτα τρέχει αυτόνομα

9
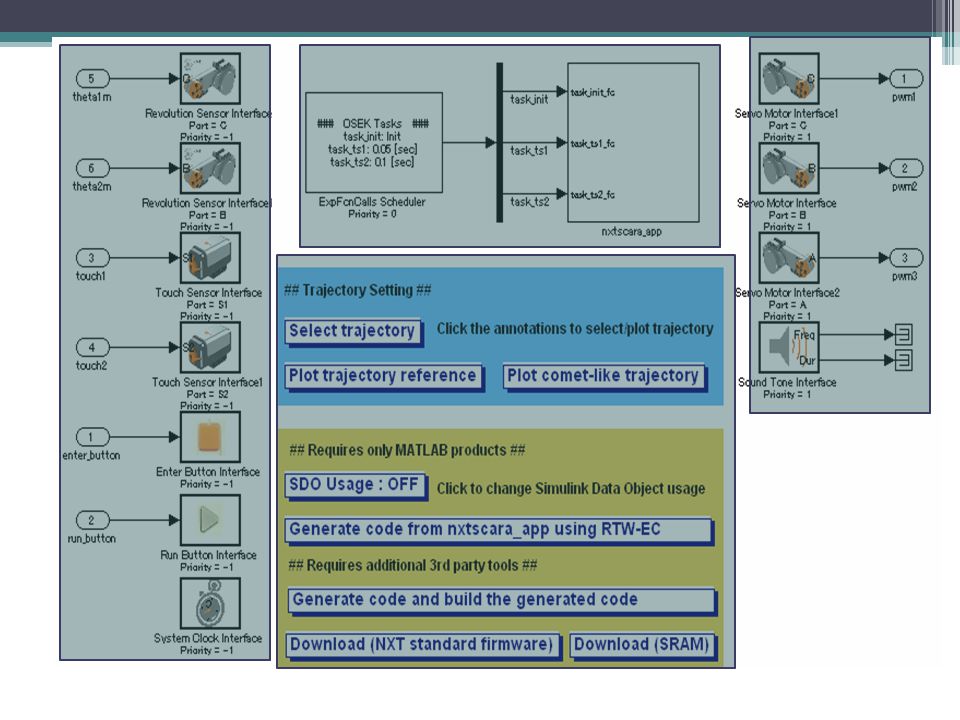
NXT SCARA Πρόγραμμα ελέγχου βραχίονα NXT Επιθυμητές τροχιές

12
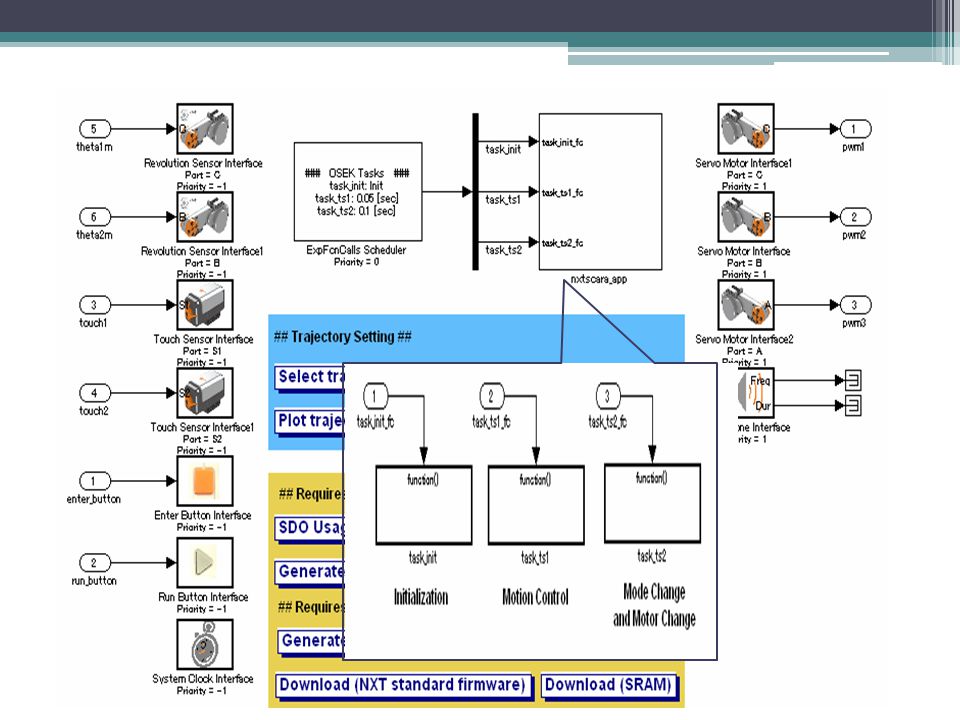
Task_ts1_fc

13
Η τρίτη τώρα είσοδος αναφέρεται στη ροή του προγράμματος.
Task_ts2_fc

14
m. αρχεία του nxt scara param_nxtscara.m Δήλωση παραμέτρων
param_plant.m Παράμετρος εγκατάστασης param_controller.m Παράμετρος ελέγχου param_sim.m Παράμετρος προσομοίωσης και εικονικής πραγματικότητας theta2xy Κινηματική ανάλυση xy2theta.m Αντίστροφη Κινηματική cp_circle.m Υπολογισμός τροχιάς του κύκλου

15
NXT Scara 2 Τρόπους λειτουργίας
Κανονική εκτέλεση του προγράμματος για σχεδίαση του ρομπότ μας Λειτουργία ρύθμισης

16
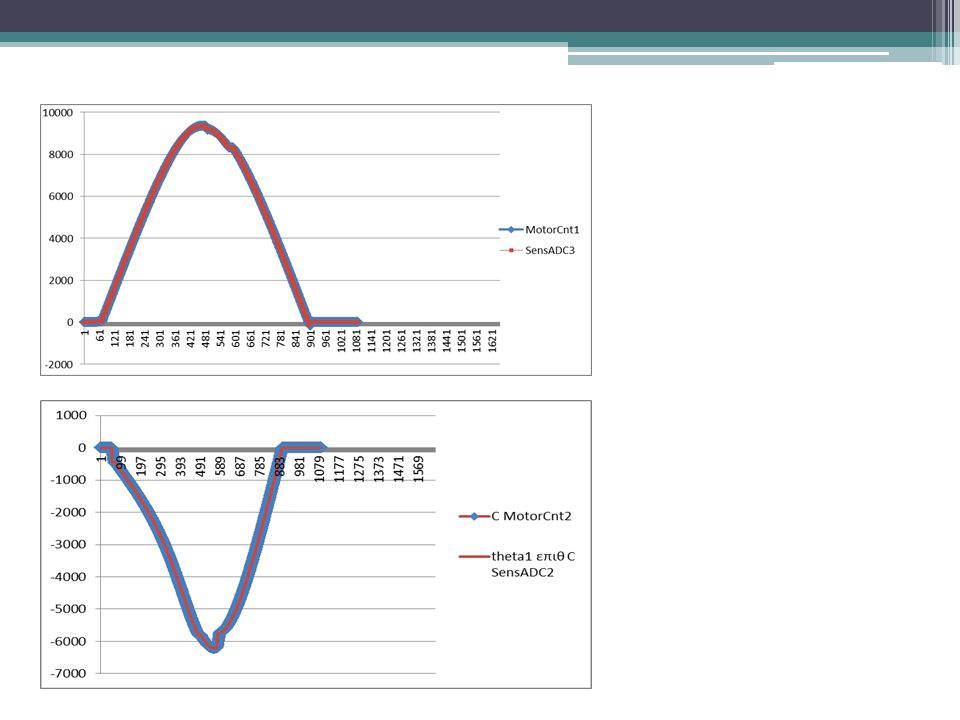
Γραφήματα επιθυμητής με πραγματικής συμπεριφοράς των μοτέρ

Παρόμοιες παρουσιάσεις




 είναι ένας μηχανικός διακόπτης, του οποίου οι επαφές ελέγχονται από έναν ηλεκτρομαγνήτη. Ο ηλεκτρονόμος είναι ένα.>")



 με τη βοήθεια Εμπείρου Συστήματος Πτυχιακή Εργασία Δημοσθένης Νικούδης (051092) 14/4/2011.>")









 Η τεχνολογία που στηρίζει τη νέα ρομποτική πλατφόρμα Engino Δρ. Γιώργος Α. Δημητρίου Τμήμα Πληροφορικής και Μηχανικών.>")
