Κατέβασμα παρουσίασης
Η παρουσίαση φορτώνεται. Παρακαλείστε να περιμένετε

1
Ρομποτική Αισθητήρες Εργαστήριο Αυτοματικής - Ρομποτικής

2
Γενικά Αισθητήρας – Sensor : Μια συσκευή η οποία αντιλαμβάνεται μέρος του φυσικού κόσμου και παρέχει την πληροφορία σε μορφή ηλεκτρικού σήματος. Το εν λόγω ηλεκτρικό σήμα, είτε ως έχει είτε κατάλληλα επεξεργασμένο μπορεί να ‘αναγνωσθεί’ από κάθε μορφής Η/Υ – εξ’ ού και το τεράστιο ενδιαφέρον του θέματος Υπάρχει σήμερα διαθέσιμη μια τεράστια ποικιλία αισθητήρων που είναι ικανοί : Να μετρήσουν σχεδόν κάθε φυσικό μέγεθος : Απόσταση, ταχύτητα, επιτάχυνση, θερμοκρασία, πίεση, υγρασία,.. Να παρέξουν πληροφορία : εικόνας, ήχου, οσμής, αφής..

3
Περιοχές εφαρμογής και χρήσης αισθητήρων …θα έλεγε κανείς ότι δεν υπάρχει πλέον τομέας ανθρώπινης δραστηριότητας στον οποίο να μην μπορεί κανείς να εντοπίσει ή να προβλέψει χρήση αισθητήρων. Ειδικότερο πάντως αξίζουν αναφοράς οι παρακάτω τομείς :

4
Βιομηχανικό περιβάλλον Είναι ο χώρος στον οποίο βρήκαν κατ’ αρχήν εφαρμογή. Χρήσεις Παρακολούθηση (monitoring) παραγωγικής διαδικασίας - για ποιοτικό έλεγχο ή απλή καταγραφή Έλεγχος μηχανών και γραμμών παραγωγής
 παραγωγικής διαδικασίας - για ποιοτικό έλεγχο ή απλή καταγραφή Έλεγχος μηχανών και γραμμών παραγωγής.")
5
Αυτοκίνητο Χρήσεις Παρακολούθηση και έλεγχος μηχανής : Μέτρηση στροφών,θερμοκρασίας, πίεσης λαδιών, κατανάλωσης καυσίμου κλπ. Ανάλυση ακυσαερίων Παρακολούθηση πορείας : Μετρηση ταχύτητας Anti Block System : Γωνιακή ταχύτητα τροχών Σύστημα ελέγχου ευστάθειας (ESP) : Επιταχυνσιόμετρο, γυροσκόπιο Αερόσακοι : Επιταχυνσιόμετρο Πλοήγηση : GPS Ασφάλεια : Παρακολούθηση πίεσης ελαστικών, προπορευόμενων αυτοκινήτων, κατάστασης οδηγού …. Ανέσεις : Αισθητήρας βροχής, βοήθεια στο παρκάρισμα …
 : Επιταχυνσιόμετρο, γυροσκόπιο Αερόσακοι : Επιταχυνσιόμετρο Πλοήγηση : GPS Ασφάλεια : Παρακολούθηση πίεσης ελαστικών, προπορευόμενων αυτοκινήτων, κατάστασης οδηγού …. Ανέσεις : Αισθητήρας βροχής, βοήθεια στο παρκάρισμα ….")
6
Οικιακό περιβάλλον

7
Γεωργία (Τηλε)Παρακολούθηση κατάστασης εδάφους φυτών και καρπών Πλήρης παρακολούθηση και έλεγχος σε ελεγχόμενα περιβάλλοντα (θερμοκήπια κλπ) Εφαρμογές GPS για αυτοματοποίηση άρωσης, ψεκάσματος …
Παρακολούθηση κατάστασης εδάφους φυτών και καρπών Πλήρης παρακολούθηση και έλεγχος σε ελεγχόμενα περιβάλλοντα (θερμοκήπια κλπ) Εφαρμογές GPS για αυτοματοποίηση άρωσης, ψεκάσματος …")
8
Περιοχές ειδικότερου ενδιαφέροντος Μηχατρονική Οι αισθητήρες αποτελούν «δομικά στοιχεία» των μηχατρονικών συσκευών Ρομποτική Ταχύτατα ανερχόμενη τεχνολογία. Αδιανόητη χωρίς αισθητήρες Ιατρική Πλήθος μηχατρονικές συσκευές αποκατάστασης και βοήθειας υπόσχονται καλύτερη ζωή για ασθενείς με κινητικά προβλήματα

9
Γενικά Αν ο αισθητήρας ανιχνεύει απλώς μια από δύο πιθανές καταστάσεις (ύπαρξη εμποδίου ή μη, θερμό - κρύο κλπ), τότε ονομάζεται ανιχνευτής (detector). Η πληροφορία που παρέχει τότε είναι φυσικά 1 bit. Σε κάθε άλλη περίπτωση ο αισθητήρας ‘δημιουργεί’ πολύ μεγαλύτερα ποσά πληροφορίας, τα οποία με κάποιο τρόπο πρέπει να διαθέσει στον Η/Υ. Αναλόγως του τύπου της εν λόγω πληροφορίας, οι αισθητήρες διακρίνονται κατ’ αρχήν σε : Αναλογικούς και ψηφιακούς

10
Γενικά Αναλογικού τύπου : Η πληροφορία παρέχεται σε μορφή αναλογικού σήματος. Συνηθέστατα υπό μορφή πλάτους τάσεως στην περιοχή +/- 5 V. Αισθητήρας Η/Υ Αναλογικές είσοδοι Αναλογικό σήμα χρόνος τάση Φυσικός κόσμος Μειονεκτήματα τους αποτελούν τα εγγενή μειονεκτήματα των αναλογικών συστημάτων : Ευαισθησία στον θόρυβο, εξάρτηση από μεταβολές στο περιβάλλον, κλπ

11
Γενικά Ψηφιακού τύπου. Α’ Περίπτωση : O αισθητήρας είτε παρέχει την πληροφορία με κάποιας μορφής ψηφιακή διαμόρφωση : PWM, απλή παλμοσειρά, διπλή παλμοσειρά … Αισθητήρας Η/Υ Ψηφιακές ή ειδικές είσοδοι PWM Φυσικός κόσμος παλμοσειρά ή Πρόκειται για απλούς αισθητήρες. Το ψηφιακό σήμα παράγεται με φυσικό συνήθως τρόπο. Απαιτούν όμως από τον Η/Υ να διαθέτει ψηφιακές ή ειδικές εισόδους.

12
Γενικά Ψηφιακού τύπου. Β’ Περίπτωση : O αισθητήρας διαθέτει (μικρο) επεξεργαστή ο οποίος αφού επεξεργασθεί το ηλεκτρικό σήμα διαθέτει την πληροφορία σε μορφή ψηφιακής λέξης στον Η/Υ. Η ‘επικοινωνία’ μπορεί να πραγματοποιηθεί με οποιονδήποτε τρόπο επικοινωνούν υπολογιστές …. Αισθητήρας Η/Υ Φυσικός κόσμος Πρόκειται για πλέον πολύπλοκους και ακριβούς (προς το παρόν) αισθητήρες. Μια μέρα πάντως όλοι θα λειτουργούν έτσι ….
 επεξεργαστή ο οποίος αφού επεξεργασθεί το ηλεκτρικό σήμα διαθέτει την πληροφορία σε μορφή ψηφιακής λέξης στον Η/Υ. Η ‘επικοινωνία’ μπορεί να πραγματοποιηθεί με οποιονδήποτε τρόπο επικοινωνούν υπολογιστές …. Αισθητήρας Η/Υ Φυσικός κόσμος Πρόκειται για πλέον πολύπλοκους και ακριβούς (προς το παρόν) αισθητήρες. Μια μέρα πάντως όλοι θα λειτουργούν έτσι …..")
13
Ανιχνευτές προσέγγισης (proximity detectors) - γενικά 13 Πρόκειται για ηλεκτρονικά όργανα που ανιχνεύουν ύπαρξη αντικειμένων. Η πληροφορία συνεπώς που δίδουν είναι 0/1 ή ON/OFF. Είναι ευρύτατα διαδεδομένα στην βιομηχανία λόγω του χαμηλού κόστους, της ευκολίας χρήσης και της αξιοπιστίας τους. Ο πλέον κοινός τύπος, χρησιμοποιεί απλώς μια φωτεινή δέσμη και έναν δέκτη φωτεινής ακτινοβολίας (που μπορεί να υλοποιείται με φωτοδίοδο, φωτοτρανζίστορ, φωτοαντίσταση κλπ). Η ύπαρξη αντικειμένου στην περιοχή ανίχνευσης, οδηγεί σε διακοπή της δέσμης και άρα ανίχνευση. Οι αποστάσεις που μπορούν να «καλυφθούν» μπορεί να φτάσουν δεκάδες μέτρα. Συνδυαζόμενες πολλές δέσμες μπορούν να δημιουργήσουν φωτεινή «κουρτίνα». Μια άλλη κατηγορία τέτοιων οργάνων χρησιμοποιεί κατάλληλα σχεδιασμένο κύκλωμα μέρος του οποίου είναι επαγωγικό πηνίο. Η ύπαρξη μετάλλου κοντά στο πηνίο, αλλάζει (ελάχιστα) την αυτεπαγωγή του, οδηγεί το κύκλωμα σε συντονισμό και άρα μέγιστο ρεύμα που είναι εύκολο να αναγνωρισθεί. Πρόκειται για τους επαγωγικούς ανιχνευτές, που όπως αναφέρθηκε ανιχνεύουν μέταλλα σε αποστάσεις μέχρι 1.. 2 cm. Αν στην θέση του πηνίου φαντασθεί κανείς κατάλληλο πυκνωτή και αντίστοιχα σχεδιασμένο κύκλωμα, τότε μπορούν να ανιχνευθούν από αντίστοιχες αποστάσεις σώματα με υψηλή διηλεκτρική σταθερά : χαρτί, υγρά, ξύλο, πλαστικό κλπ. Έχομε τότε τους χωρητικούς ανιχνευτές.
. Η ύπαρξη αντικειμένου στην περιοχή ανίχνευσης, οδηγεί σε διακοπή της δέσμης και άρα ανίχνευση. Οι αποστάσεις που μπορούν να «καλυφθούν» μπορεί να φτάσουν δεκάδες μέτρα. Συνδυαζόμενες πολλές δέσμες μπορούν να δημιουργήσουν φωτεινή «κουρτίνα». Μια άλλη κατηγορία τέτοιων οργάνων χρησιμοποιεί κατάλληλα σχεδιασμένο κύκλωμα μέρος του οποίου είναι επαγωγικό πηνίο. Η ύπαρξη μετάλλου κοντά στο πηνίο, αλλάζει (ελάχιστα) την αυτεπαγωγή του, οδηγεί το κύκλωμα σε συντονισμό και άρα μέγιστο ρεύμα που είναι εύκολο να αναγνωρισθεί. Πρόκειται για τους επαγωγικούς ανιχνευτές, που όπως αναφέρθηκε ανιχνεύουν μέταλλα σε αποστάσεις μέχρι cm. Αν στην θέση του πηνίου φαντασθεί κανείς κατάλληλο πυκνωτή και αντίστοιχα σχεδιασμένο κύκλωμα, τότε μπορούν να ανιχνευθούν από αντίστοιχες αποστάσεις σώματα με υψηλή διηλεκτρική σταθερά : χαρτί, υγρά, ξύλο, πλαστικό κλπ. Έχομε τότε τους χωρητικούς ανιχνευτές..")
14
Αισθητήρες θέσης Κωδικοποιητής γωνιακής θέσης αυξητικού τύπου (Incremental Shaft Encoder) 14 Η ιδέα : Ακίνητος ανιχνευτής παρακολουθεί «ιδιαιτερότητες» που έχουν τοποθετηθεί σε στρεφόμενο άξονα με σκοπό την παρακολούθηση της γωνίας στροφής του. Οι εν λόγω «ιδιαιτερότητες» μπορεί να είναι εγκοπές ή τεχνητά μεταλλικά «εξογκώματα», οπότε μπορεί να χρησιμοποιηθεί επαγωγικός ανιχνευτής ή..εγκοπές σε αδιαφανή δίσκο που έχει προσαρμοσθεί στον άξονα και περιστρέφεται μαζί του. Για την ανίχνευση των εγκοπών μπορεί να χρησιμοποιηθεί ζεύγος φωτεινής πηγής και φωτοανιχνευτή (φωτοδιόδου, φωτοτρανζίστορ). Όταν περιστρέφεται ο άξονας, παράγεται με τον τρόπο αυτό μια σειρά παλμών. Ο αριθμός (το πλήθος) των παλμών μας δίδει πληροφορία γωνιακής θέσης (γωνίας στροφής) ενώ η συχνότητά τους πληροφορία γωνιακής ταχύτητας του άξονα. Για την μέτρηση της γωνιακής ταχύτητας μπορεί επίσης να χρησιμοποιηθεί κύκλωμα μετατροπής «συχνότητας σε τάση» ή να μετρηθεί με ακρίβεια η περίοδος της παλμοσειράς
. Όταν περιστρέφεται ο άξονας, παράγεται με τον τρόπο αυτό μια σειρά παλμών. Ο αριθμός (το πλήθος) των παλμών μας δίδει πληροφορία γωνιακής θέσης (γωνίας στροφής) ενώ η συχνότητά τους πληροφορία γωνιακής ταχύτητας του άξονα. Για την μέτρηση της γωνιακής ταχύτητας μπορεί επίσης να χρησιμοποιηθεί κύκλωμα μετατροπής «συχνότητας σε τάση» ή να μετρηθεί με ακρίβεια η περίοδος της παλμοσειράς.")
15
Αισθητήρες θέσης Κωδικοποιητής γωνιακής θέσης αυξητικού τύπου (Incremental Shaft Encoder) 15 Αν χρησιμοποιηθεί και ένας δεύτερος ανιχνευτής έτσι ώστε οι δύο παραγόμενες παλμοσειρές να έχουν διαφορά φάσης περίπου 90 ο, τότε μπορεί κανείς από την προπορεία των παλμοσειρών να συνάγει την φορά περιστροφής. Η «αποκωδικοποίηση» των παλμοσειρών αναδεικνύει 4 διακριτές καταστάσεις για κάθε εγκοπή – quadrature encoder Στο εμπόριο υπάρχουν διαθέσιμοι encoders με 360, 1000 η και πολύ μεγαλύτερο αριθμό εγκοπών. Οπότε η ανάλυση γωνιακής θέσης που προκύπτει είναι 360 ο / (360*4) = 1/4 ο και 360 ο / (1000*4) = 0.09 ο αντίστοιχα
 = 1/4 ο και 360 ο / (1000*4) = 0.09 ο αντίστοιχα.")
16
Αισθητήρες θέσης Κωδικοποιητής γωνιακής θέσης αυξητικού τύπου (Incremental Shaft Encoder) 16 Για την αξιόπιστη απαρίθμηση των παλμών για την μέτρηση της γωνίας στροφής μπορούν να χρησιμοποιηθούν : Μικροελεγκτής : Θα πρέπει να χρησιμοποιήσει δύο ψηφιακές εισόδους και αντίστοιχα interrupts. Ειδικευμένο ολοκληρωμένο κύκλωμα : Στο κύκλωμα οδηγούνται οι παλμοσειρές και αυτό αναλαμβάνει να «αποκωδικοποιήσει» και να καταγράφει την πραγματική γωνία στροφής σε καταχωρητή του. Το κύκλωμα είναι συνήθως μέρος του ελεγκτή ο δε κεντρικός επεξεργαστής έχει πρόσβαση στον εν λόγω καταχωρητή. Η μέτρηση της γωνίας στροφής είναι «σχετική», «αυξητική», μετριέται δηλαδή από κάποιο σημείο «εκκίνησης» ή σημείο αναφοράς και μετά. Συνεπώς αν χαθεί από τον μικροελεγκτή ή το ειδικευμένο κύκλωμα η πληροφορία του συνολικού αριθμού παλμών, το σύστημα δεν γνωρίζει την πραγματική θέση του άξονα. Για να αποφευχθεί ο παραπάνω κίνδυνος συνήθως υλοποιείται η δεύτερη μέθοδος και το ειδικευμένο κύκλωμα τροφοδοτείται από μπαταρίες. Αν παρ’ όλα αυτά η πραγματική γωνιακή θέση χαθεί, τότε το σύστημα πρέπει να κινηθεί προς την θέση αναφοράς – που την βρίσκει με την βοήθεια τερματικού διακόπτη ή ανιχνευτή. Αν χρησιμοποιηθεί και ένας τρίτος παλμός, index pulse, που παράγεται από μια μοναδική εγκοπή στον δίσκο, έτσι που η θέση αναφοράς να είναι αυτή για την οποία ισχύει ότι : πρέπει να έχει «κτυπηθεί» ο τερματικός και να υπάρχει ο index pulse, τότε η θέση αναφοράς εντοπίζεται κάθε φορά με την ανάλυση μέτρησης θέσης του συστήματος.

17
Αισθητήρες θέσης Κωδικοποιητής γωνιακής θέσης απολύτου τύπου (Ablosute Shaft Encoder) 17 Μπορεί κανείς να χρησιμοποιήσει περισσότερους από ένα ανιχνευτές και αντίστοιχες σειρές «εγκοπών» κατάλληλα μελετημένων, ούτως ώστε για κάθε γωνία στροφής του δίσκου να αντιστοιχεί ένας μοναδικός συνδυασμός καταστάσεων των ανιχνευτών. Για κάθε γωνία δηλαδή να παράγεται κάποιος «κώδικας», μια λέξη n bits, όπου n το πλήθος των σειρών «εγκοπών».. Ο απλούστερος τέτοιος κώδικας είναι ο δυαδικός. Η ανάλυση (resolution) μέτρησης θέσης είναι προφανώς 360 ο /2 n Μειονέκτημα της δυαδικής κωδικοποίησης αποτελεί το γεγονός ότι σε αρκετές θέσεις, η μετάβαση από την μια τιμή γωνίας στην άλλη γίνεται με ταυτόχρονη αλλαγή κατάστασης σε πολλούς ανιχνευτές (μετάβαση από το 000 στο 111). Αυτό μπορεί να οδηγήσει σε απρόβλεπτες αναγνώσεις γωνίας, αφού η όλη κατασκευή δεν μπορεί να είναι γεωμετρικά τέλεια…
 μέτρησης θέσης είναι προφανώς 360 ο /2 n Μειονέκτημα της δυαδικής κωδικοποίησης αποτελεί το γεγονός ότι σε αρκετές θέσεις, η μετάβαση από την μια τιμή γωνίας στην άλλη γίνεται με ταυτόχρονη αλλαγή κατάστασης σε πολλούς ανιχνευτές (μετάβαση από το 000 στο 111). Αυτό μπορεί να οδηγήσει σε απρόβλεπτες αναγνώσεις γωνίας, αφού η όλη κατασκευή δεν μπορεί να είναι γεωμετρικά τέλεια….")
18
Αισθητήρες θέσης Κωδικοποιητής γωνιακής θέσης απολύτου τύπου –Κώδικας Gray 18 Προκειμένου να παρακαμφθεί το προηγούμενο πρόβλημα, χρησιμοποιείται επίσης η λεγόμενη κωδικοποίηση Gray – Gray code. Μπορεί κανείς να παρατηρήσει εδώ ότι η μετάβαση από την μια γωνία (τομέα) στην επόμενη γίνεται με αλλαγή ενός μόνον bit, της λέξης του κώδικα. Υπάρχουν διαθέσιμα ολοκληρωμένα κυκλώματα για την ταχύτατη μετατροπή του κώδικα Gray σε δυαδικό για την ανάγνωση της γωνίας από τον υπολογιστή ελέγχου. Προφανώς την μετατροπή μπορεί να αναλάβει και μικροελεγκτής αν η αναπόφευκτη καθυστέρηση της μετατροπής δεν δημιουργού πρόβλημα.
 στην επόμενη γίνεται με αλλαγή ενός μόνον bit, της λέξης του κώδικα. Υπάρχουν διαθέσιμα ολοκληρωμένα κυκλώματα για την ταχύτατη μετατροπή του κώδικα Gray σε δυαδικό για την ανάγνωση της γωνίας από τον υπολογιστή ελέγχου. Προφανώς την μετατροπή μπορεί να αναλάβει και μικροελεγκτής αν η αναπόφευκτη καθυστέρηση της μετατροπής δεν δημιουργού πρόβλημα..")
19
Αισθητήρες θέσης Κωδικοποιητής γραμμικής θέσης – linear encoders 19 Η ίδια ιδέα που χρησιμοποιήθηκε για την ψηφιακή μέτρηση της γωνίας στροφής, μπορεί να χρησιμοποιηθεί και για την μέτρηση γραμμικής μετατόπισης. Να χρησιμοποιηθεί δηλαδή για την μέτρηση της θέσης μιας πρισματικής «άρθρωσης». Και πάλι η κωδικοποίηση μπορεί να είναι αυξητικού τύπου ή απόλυτη. Μέτρηση γραμμικής μετατόπισης με μεγάλη «ανάλυση» χρειάζονται πολλές μηχανές και συσκευές. Για τον λόγο αυτό έχουν έχει αναπτυχθεί μια μεγάλη ποικιλία σχετικών οργάνων. Μια καλή επισκόπηση μπορεί κανείς να βρει εδώ : http://en.wikipedia.org/wiki/Linear_encoder Υπάρχει βεβαίως και η δυνατότητα να μετρηθεί η γραμμική μετατόπιση με χρήση αισθητήρα μέτρησης γωνιακής θέσης, αρκεί η γραμμική θέση να «μετατραπεί» σε γωνιακή με κατάλληλη διάταξη : http://www.youtube.com/watch?v=YYzSTDR35OU

20
Αισθητήρες θέσης Ποτενσιόμετρο (potentiometer) 20 Πρόκειται στην ουσία για μια μεταβλητή αντίσταση, που τροφοδοτείται με σταθερή τάση (V in στο σχήμα). Η τάση της μεσαίας λήψης V out είναι ένα αναλογικό σήμα από το οποίο μπορεί να προκύψει η μετατόπισή της. Η όλη διάταξη μπορεί να είναι γραμμική οπότε προκύπτει γραμμικό ποτενσιόμετρο για μέτρηση μετατόπισης ή γωνιακή οπότε προκύπτει γωνιακό ποτενσιόμετρο για μέτρηση γωνίας στροφής. Ως όργανο μέτρησης έχει το βασικό μειονεκτήματα των αναλογικών οργάνων : η μέτρηση μπορεί να αλλοιωθεί από θόρυβο. Η κινητή επαφή (μεσαία λήψη) ολισθαίνει συνεχώς πάνω στην σταθερή αντίσταση οπότε δημιουργούνται φθορές που μειώνουν την ακρίβεια και αξιοπιστία του οργάνου. Χρησιμοποιείται μόνο όταν οι κινήσεις δεν είναι συνεχείς.
 ολισθαίνει συνεχώς πάνω στην σταθερή αντίσταση οπότε δημιουργούνται φθορές που μειώνουν την ακρίβεια και αξιοπιστία του οργάνου. Χρησιμοποιείται μόνο όταν οι κινήσεις δεν είναι συνεχείς..")
21
Αισθητήρες θέσης Γραμμικός Μεταβλητός Διαφορικός Μετασχηματιστής (Linear Variable Differential Transformer, LVDT) …μέτρηση μικρών μετατοπίσεων με μεγάλη ακρίβεια 21 Πλεονεκτήματα Απόλυτη μέτρηση «Άπειρη» διακριτική ικανότητα Ταχύτατη «απόκριση» Απουσία τριβών
 …μέτρηση μικρών μετατοπίσεων με μεγάλη ακρίβεια 21 Πλεονεκτήματα Απόλυτη μέτρηση «Άπειρη» διακριτική ικανότητα Ταχύτατη «απόκριση» Απουσία τριβών")
22
Αισθητήρες γωνιακής ταχύτητας Ταχογεννήτρια (tachogenarator) 22 Πρόκειται για μικρή γεννήτρια, συνεχούς ρεύματος συνήθως, που περιστρεφόμενη παράγει τάση. Αν σχεδιασθεί κατάλληλα η εν λόγω τάση είναι ανάλογη της γωνιακής ταχύτητας. Μπορεί συνεπώς να χρησιμοποιηθεί ως αναλογικό όργανο μέτρησής της. Ως όργανο μέτρησης έχει το βασικό μειονεκτήματα των αναλογικών οργάνων : η μέτρηση μπορεί να αλλοιωθεί από θόρυβο. Χρησιμοποιείται ευρύτατα σε συστήματα ελέγχου γωνιακής ταχύτητας. Σε συστήματα ελέγχου θέσης η πληροφορία ταχύτητας, όταν αυτή απαιτείται για τον έλεγχο, μπορεί να προκύψει από τον κωδικοποιητή θέσης –όπως έχομε ήδη αναφέρει.

23
Μέτρηση δυνάμεων και ροπών - Γενικά Μετρητής παραμόρφωσης – strain gauge 23 Η μέτρηση δυνάμεων ή ροπών γίνεται γενικά με έμμεσο τρόπο : Μετριέται το αποτέλεσμα της επενέργειας της δύναμης ή της ροπής, η παραμόρφωση δηλαδή, σε καλά σχεδιασμένες κατασκευές. Για την μέτρηση της παραμόρφωσης, χρησιμοποιούνται ειδικές αντιστάσεις, σε μορφή μαιάνδρου προκειμένου να έχουν μεγάλο μήκος, ενσωματωμένες συνήθως σε πλαστικό φύλλο : οι ονομαζόμενοι μετρητές παραμόρφωσης ή μηκυνσιόμετρα (strain gauges). Οι εν λόγω αντιστάσεις προσκολλούνται με ειδική κόλλα στην κατασκευή της οποίας θέλομε να μετρήσομε την παραμόρφωση έτσι που να υφίστανται την ίδια ακριβώς παραμόρφωση, που για την αντίσταση αντιστοιχεί σε μεταβολή μήκους – ΔL. Η ελάχιστη αυτή μεταβολή μήκους αντιπροσωπεύει μια εξίσου μικρή μεταβολή στην αντίσταση – ΔR, η οποία μεταβολή μπορεί να μετρηθεί με την βοήθεια γέφυρας Wheatstone. Η μεταβολή εμφανίζεται ως τάση V. Με την τεχνική αυτή, με σωστό σχεδιασμό της γέφυρας και με χρήση καλής ποιότητας ενισχυτή σήματος μπορούν να μετρηθούν παραμορφώσεις της τάξης του 10 -7.
. Οι εν λόγω αντιστάσεις προσκολλούνται με ειδική κόλλα στην κατασκευή της οποίας θέλομε να μετρήσομε την παραμόρφωση έτσι που να υφίστανται την ίδια ακριβώς παραμόρφωση, που για την αντίσταση αντιστοιχεί σε μεταβολή μήκους – ΔL. Η ελάχιστη αυτή μεταβολή μήκους αντιπροσωπεύει μια εξίσου μικρή μεταβολή στην αντίσταση – ΔR, η οποία μεταβολή μπορεί να μετρηθεί με την βοήθεια γέφυρας Wheatstone. Η μεταβολή εμφανίζεται ως τάση V. Με την τεχνική αυτή, με σωστό σχεδιασμό της γέφυρας και με χρήση καλής ποιότητας ενισχυτή σήματος μπορούν να μετρηθούν παραμορφώσεις της τάξης του")
24
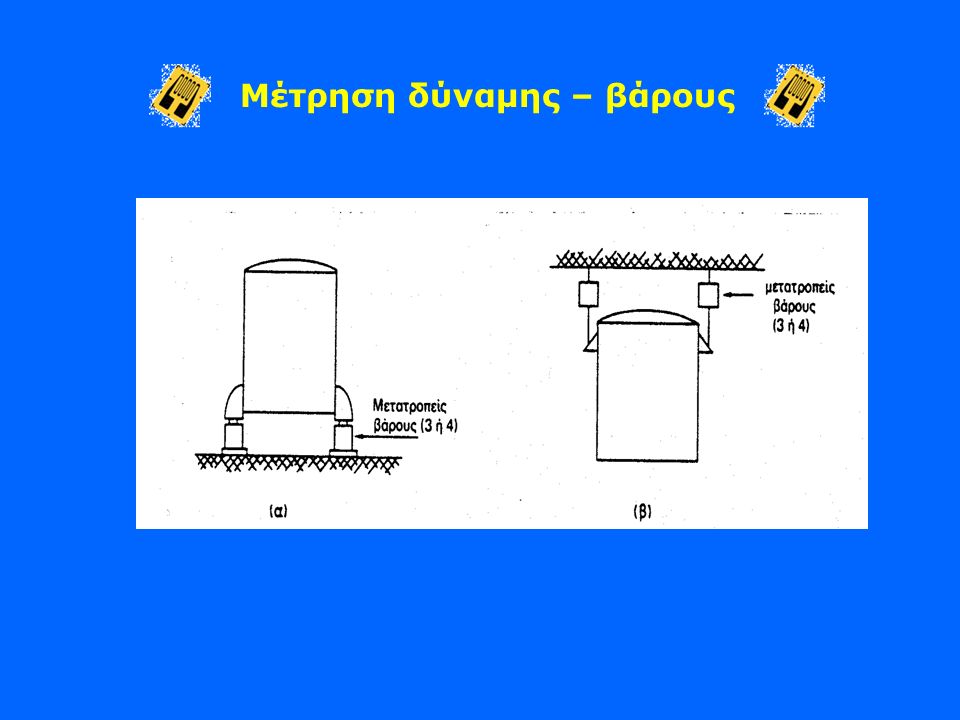
Μέτρηση δυνάμεων - Γενικά Δυναμοκυψέλες – Load Cells 24 Για την μέτρηση δυνάμεων σχεδιάζονται μεταλλικές διατάξεις οι οποίες τοποθετούνται ανάμεσα στην ασκούμενη δύναμη και την κατασκευή, παραλαμβάνουν τις δυνάμεις και τις μεταβιβάζουν στην κατασκευή. Οι διατάξεις αυτές πρέπει να παραμορφώνονται ελάχιστα - για να μην μεταβάλλουν την γεωμετρία της κατασκευής και τις συνθήκες φόρτισης. Συνήθως αντί για ένα τοποθετούνται τέσσερα μηκυνσιόμετρα.

25
Μέτρηση ροπής - Γενικά 25 Η ροπή που αναπτύσσεται στον άξονα στρεφόμενου ηλεκτρικού κινητήρα σχετίζεται άμεσα με το ρεύμα που απορροφά. Στην περίπτωση του κινητήρα συνεχούς ρεύματος, ισχύει η απλή σχέση : Τ = Κτ * i όπου Κτ : σταθερά ροπής, i : ρεύμα οπλισμού Η μέτρηση συνεπώς του ρεύματος - που είναι μια απλή διαδικασία - μας δίδει πληροφορία για την ροπή του κινητήρα και κατ’ επέκταση για την ροπή που αναπτύσσεται στα μέλη του. Δεδομένου όμως ότι μεταξύ του κινητήρα και του μέλους παρεμβάλλεται κιβώτιο μείωσης το οποίο «σπαταλά» άγνωστα ποσά ενέργεια, η ακριβής μέτρηση των ροπών στα μέλη του βραχίονα με τον τρόπο αυτό, έχει περιορισμούς. Υπάρχουν διαθέσιμοι μετρητές «ροπής άξονα» γενικής χρήσης. Ως αρχή λειτουργίας, χρησιμοποιούν ένα ειδικά σχεδιασμένο άξονα, που αναλαμβάνει να μεταβιβάσει την ροπή από τον κινητήριο μηχανισμό στο φορτίο, οπότε αναπόφευκτα παραμορφώνεται. Στην απλούστερη περίπτωση, η παραμόρφωση μετράται με κατάλληλα τοποθετημένο μετρητή παραμόρφωσης.

26
Αισθητήρες «κατεύθυνσης κίνησης» (Heading sensors) Πυξίδες Από το … 2000 π.Χ. …. όταν οι Κινέζοι κρέμαγαν από ένα μεταξωτό νήμα ένα κομμάτι μαγνητίτη και το χρησιμοποιούσαν για πλοήγηση αμαξών στις αχανείς εκτάσεις. Μαγνητικό πεδίο της γης –Απόλυτη αναφορά για προσανατολισμό. Το χρησιμοποιούν και τα αποδημητικά πουλιά (ανακάλυψη 2001) Ποικιλία επιλογών για μέτρηση –παρακολούθηση του μαγνητικού πεδίου : –Μηχανικές μαγνητικές πυξίδες –Απ’ ευθείας μέτρηση του μαγνητικού πεδίου (Hall-effect, magneto-resistive sensors) Κυριότερα προβλήματα –Ασθενές μαγνητικό πεδίο γης (30 μTesla) –…εύκολα διαταράσσεται από τα διάσπαρτα μαγνητικά πεδία –Περιορισμένο εύρος ζώνης bandwidth (0.5 Hz)
 Ποικιλία επιλογών για μέτρηση –παρακολούθηση του μαγνητικού πεδίου : –Μηχανικές μαγνητικές πυξίδες –Απ’ ευθείας μέτρηση του μαγνητικού πεδίου (Hall-effect, magneto-resistive sensors) Κυριότερα προβλήματα –Ασθενές μαγνητικό πεδίο γης (30 μTesla) –…εύκολα διαταράσσεται από τα διάσπαρτα μαγνητικά πεδία –Περιορισμένο εύρος ζώνης bandwidth (0.5 Hz).")
27
Αισθητήρες «κατεύθυνσης κίνησης» (Heading sensors) Μηχανικό Γυροσκόπιο (Gyro) Βασίζεται στις αδρανειακές ιδιότητες ενός ταχέως περιστρεφόμενου άξονα : Ο άξονας διατηρεί τον προσανατολισμό του, εφ όσον δεν ασκείται σ’ αυτόν εξωτερική ροπή. Με κατάλληλο μηχανολογικό σχεδιασμό εξασφαλίζομε ότι δεν μεταφέρεται ή μεταφέρεται ελάχιστη ροπή σε ταχέως περιστρεφόμενο άξονα. –Πάντως και η ελάχιστη τριβή στις εδράσεις αναπόφευκτα επιβάλλει ροπή και άρα οδηγεί σε σφάλμα (drift) Ένα γυροσκόπιο υψηλής ποιότητας (0.1° σε 6 ώρες λειτουργίας) κοστίζει περίπου 100,000 $ Ο άξονας περιστροφής πρέπει να είναι παράλληλος στον άξονα περιστροφής της γης, αλλιώς το γυροσκόπιο «διαβάζει» την περιστροφή της … Με κατάλληλες τροποποιήσεις μπορεί να μετρά γωνιακές ταχύτητες : Rate gyro
 Ένα γυροσκόπιο υψηλής ποιότητας (0.1° σε 6 ώρες λειτουργίας) κοστίζει περίπου 100,000 $ Ο άξονας περιστροφής πρέπει να είναι παράλληλος στον άξονα περιστροφής της γης, αλλιώς το γυροσκόπιο «διαβάζει» την περιστροφή της … Με κατάλληλες τροποποιήσεις μπορεί να μετρά γωνιακές ταχύτητες : Rate gyro.")
28
Αισθητήρες «κατεύθυνσης κίνησης» (Heading sensors) Οπτικό Γυροσκόπιο Single axis optical gyro Μετρά γωνιακή ταχύτητα –όχι γωνία. (rate gyro) Χρησιμοποιεί δύο δέσμες μονοχρωματικού φωτός (ή laser) από την ίδια πηγή : Οι δέσμες κινούνται, σε αντίθετη κατεύθυνση, μέσα σε οπτική ίνα διατεθειμένη στην περιφέρεια κυλίνδρου –σαν πηνίο. Η δέσμη διατρέχει ελαφρώς μικρότερη διαδρομή στην αντίθετη της περιστροφής κατεύθυνση. Η διαφορά φάσης των δύο δεσμών είναι ανάλογη της γωνιακής ταχύτητας του κυλίνδρου. Για να υπάρξει μετρήσιμη διαφορά φάσης, το «πηνίο» έχει μήκος της τάξης των 5 Km. Τα πιο σύγχρονα οπτικά γυροσκόπια κατασκευάζονται με τεχνολογίες Micro fabrication. 3-axis optical gyro
 Χρησιμοποιεί δύο δέσμες μονοχρωματικού φωτός (ή laser) από την ίδια πηγή : Οι δέσμες κινούνται, σε αντίθετη κατεύθυνση, μέσα σε οπτική ίνα διατεθειμένη στην περιφέρεια κυλίνδρου –σαν πηνίο. Η δέσμη διατρέχει ελαφρώς μικρότερη διαδρομή στην αντίθετη της περιστροφής κατεύθυνση. Η διαφορά φάσης των δύο δεσμών είναι ανάλογη της γωνιακής ταχύτητας του κυλίνδρου. Για να υπάρξει μετρήσιμη διαφορά φάσης, το «πηνίο» έχει μήκος της τάξης των 5 Km. Τα πιο σύγχρονα οπτικά γυροσκόπια κατασκευάζονται με τεχνολογίες Micro fabrication. 3-axis optical gyro.")
29
Αισθητήρες «κατεύθυνσης κίνησης» (Heading sensors) Γυροσκόπιο ταλάντωσης (vibrating gyro) Μετρά και αυτό γωνιακή ταχύτητα –όχι γωνία. (rate gyro). Βασική ιδέα αποτελεί το γεγονός ότι ταλαντούμενες μάζες, τείνουν να διατηρήσουν το επίπεδο ταλάντωσής τους, ακόμη κι όταν οι στηρίξεις του περιστρέφονται. (Φαινόμενα επιταχύνσεων Corriolis) Αυτό έχει ως αποτέλεσμα παραμόρφωση που υπό συνθήκες είναι μετρήσιμη και σχετίζεται άμεσα με την γωνιακή ταχύτητα περιστροφής. http://www.youtube.com/watch?v=zwe6LEYF0j8 Γυροσκόπια ταλάντωσης κατασκευάζονται σήμερα με τεχνολογίες MEMS και διατίθενται σε αδιανόητες για πριν μερικά χρόνια τιμές – μερικά €!
. Βασική ιδέα αποτελεί το γεγονός ότι ταλαντούμενες μάζες, τείνουν να διατηρήσουν το επίπεδο ταλάντωσής τους, ακόμη κι όταν οι στηρίξεις του περιστρέφονται. (Φαινόμενα επιταχύνσεων Corriolis) Αυτό έχει ως αποτέλεσμα παραμόρφωση που υπό συνθήκες είναι μετρήσιμη και σχετίζεται άμεσα με την γωνιακή ταχύτητα περιστροφής. v=zwe6LEYF0j8 Γυροσκόπια ταλάντωσης κατασκευάζονται σήμερα με τεχνολογίες MEMS και διατίθενται σε αδιανόητες για πριν μερικά χρόνια τιμές – μερικά €!.")
30
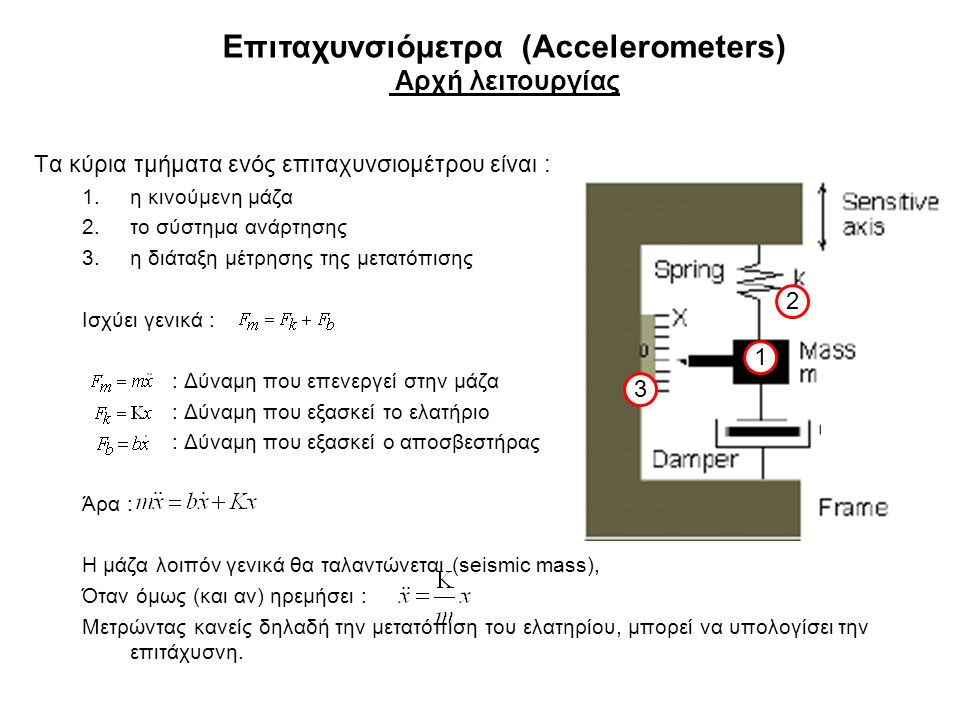
Επιταχυνσιόμετρα (Accelerometers) Αρχή λειτουργίας Τα κύρια τμήματα ενός επιταχυνσιομέτρου είναι : 1.η κινούμενη μάζα 2.το σύστημα ανάρτησης 3.η διάταξη μέτρησης της μετατόπισης Ισχύει γενικά : : Δύναμη που επενεργεί στην μάζα : Δύναμη που εξασκεί το ελατήριο : Δύναμη που εξασκεί ο αποσβεστήρας Άρα : Η μάζα λοιπόν γενικά θα ταλαντώνεται (seismic mass), Όταν όμως (και αν) ηρεμήσει : Μετρώντας κανείς δηλαδή την μετατόπιση του ελατηρίου, μπορεί να υπολογίσει την επιτάχυσνη. 1 2 3
31
Επιταχυνσιόμετρα (Accelerometers) MEMS Σήμερα κατασκευάζονται επιταχυνσιόμετρα σε πολύ μικρό μέγεθος, με την τεχνολογία MEMS. Η ίδια η στήριξη της σεισμικής μάζας υλοποιεί την δράση ελατηρίου, ενώ αδρανές αέριο εγκλωβισμένο Στην κατασκευή παίζει τον ρόλο του αποσβεστήρα. http://www.youtube.com/watch?v=KZVgKu6v808

32
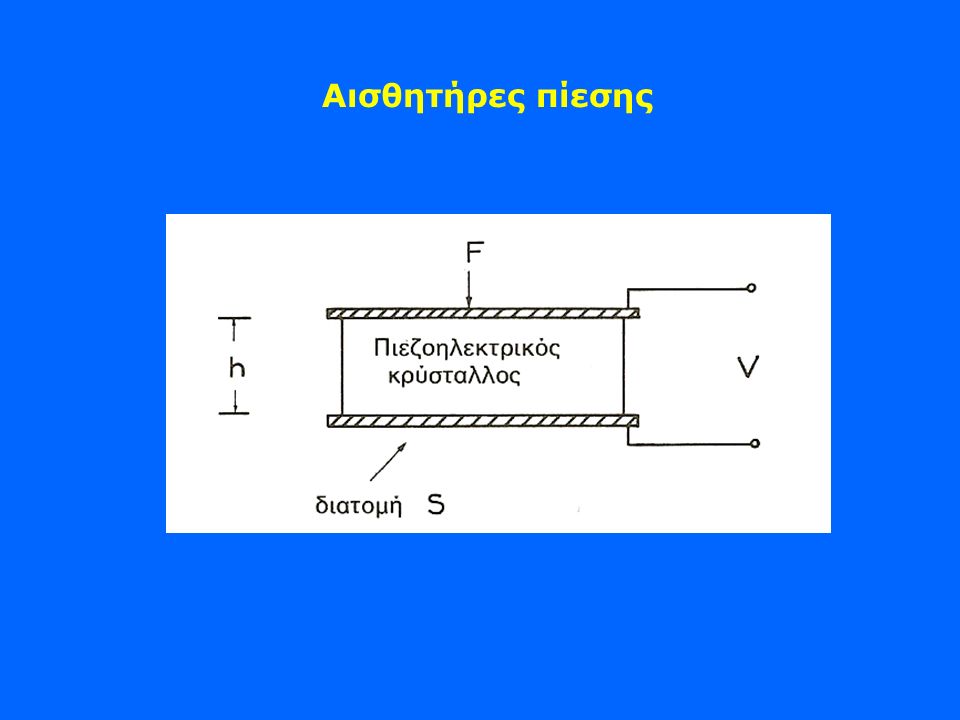
Επιταχυνσιόμετρα (Accelerometers) Πιεζοηλεκτρικά επιταχυνσιόμετρα Η μάζα στηρίζεται εδώ σε πιεζοηλεκτρικό κρύσταλλο. Για να επιταχύνει πρέπει να δεχθεί δυνάμεις απ’ αυτόν, οπότε και ο τελευταίος δέχεται αντίστοιχα δύναμη (πίεση) και «παράγει» τάση. Μειονέκτημα εδώ αποτελεί το γεγονός ότι μπορούν να μετρηθούν μόνο μεταβαλλόμενες επιταχύνσεις αφού ο κρύσταλλος παράγει τάση όσο μεταβάλλεται η πίεση που δέχεται. Κατάλληλο για μέτρηση δονήσεων. Πλεονέκτημά του το υψηλό εύρος ζώνης. http://www.youtube.com/watch?v=KZVgKu6v 808
 και «παράγει» τάση. Μειονέκτημα εδώ αποτελεί το γεγονός ότι μπορούν να μετρηθούν μόνο μεταβαλλόμενες επιταχύνσεις αφού ο κρύσταλλος παράγει τάση όσο μεταβάλλεται η πίεση που δέχεται. Κατάλληλο για μέτρηση δονήσεων. Πλεονέκτημά του το υψηλό εύρος ζώνης. v=KZVgKu6v 808.")
33
Σύστημα αδρανειακής πλοήγησης (Inertial Navigation System - INS) Αναφέρεται πολλές φορές και ως Inertial Measurement Unit - IMU. Aποτελουν ολοκληρωμένες διατάξεις αισθητήων οι οποίες καταγράφουν την επιτάχυνση και το ρυθμό περιστροφής του συστήματος στους 3 άξονες. Τα συστηματα INS ενσωματωνουν επομενως 3 επταχυνσιομετρα και 3 γυροσκοπια. H ταχυτητα και η θεση προκυπτουν απο την ολοκληρωση των μετρουμενων επιταχυνσεων.

34
Φάροι (beacons) για τον προσδιορισμό της θέσης Ένας «κομψός» τρόπος να λύσει κανείς το πρόβλημα προσδιορισμού θέσης ενός ρομπότ. «Φάροι» είναι (παθητικές ή ενεργητικές) συσκευές που εκπέμπουν ένα σήμα και βρίσκονται σε πολύ καλά γνωστή θέση στο χώρο. Η μέθοδος χρησιμοποιήθηκε από τότε που οι άνθρωποι άρχισαν να ταξιδεύουν. Φυσικοί «φάροι» – ορόσημα : αστέρια, ο ήλιος, βουνά Τεχνητοί φάροι –οι γνωστοί μας Η θέση προσδιορίζεται με επίλυση τριγώνων, αν μπορεί να μετρήσει κανείς κάποιες γωνίες ή κάποιες αποστάσεις. Τα κυριότερα μειονεκτήματα : Απαιτούν επεμβάσεις στο περιβάλλον. Τα σήματα μπορεί να παρεμποδίζονται από εμπόδια.
 συσκευές που εκπέμπουν ένα σήμα και βρίσκονται σε πολύ καλά γνωστή θέση στο χώρο. Η μέθοδος χρησιμοποιήθηκε από τότε που οι άνθρωποι άρχισαν να ταξιδεύουν. Φυσικοί «φάροι» – ορόσημα : αστέρια, ο ήλιος, βουνά Τεχνητοί φάροι –οι γνωστοί μας Η θέση προσδιορίζεται με επίλυση τριγώνων, αν μπορεί να μετρήσει κανείς κάποιες γωνίες ή κάποιες αποστάσεις. Τα κυριότερα μειονεκτήματα : Απαιτούν επεμβάσεις στο περιβάλλον. Τα σήματα μπορεί να παρεμποδίζονται από εμπόδια..")
35
Το σύστημα GPS Το παγκόσμιο σύστημα προσδιορισμού θέσης με την βοήθεια «φάρων» –Αναπτύχθηκε για στρατιωτικούς σκοπούς … –Το 1995 διατέθηκε και για πολιτικές χρήσεις. Έκτοτε απογειώθηκε η χρήση του. –24 δορυφόροι, περιστρεφόμενοι σε 6 τροχιές και σε υψόμετρο 20.190 km. –Οι τροχιές είναι έτσι σχεδιασμένες, ώστε ανά πάσα χρονική στιγμή να είναι «ορατοί» 6 δορυφόροι από κάθε σημείο της γης. –Για τον προσδιορισμό της θέσης του, ο δέκτης μετρά με έμμεσο τρόπο αποστάσεις από τουλάχιστον τρεις δορυφόρους (τριγωνισμός). –Η μέτρηση της απόστασης επιτυγχάνεται με την μέτρηση του χρόνου που απαιτείται για να φτάσει ηλεκτομαγνητικό σήμα από το δορυφόρο στον δέκτη : d = c*t Τεχνικές προκλήσεις –Η απαίτηση για εξαιρετικά ακριβή μέτρηση χρόνου : Το σήμα κινείται με την ταχύτητα του φωτός, συνεπώς σφάλμα 1 nsec ισοδυναμεί με σφάλμα θέσης 0.3 m. –Η απαίτηση γι απόλυτο συγχρονισμό των ρολογιών των δορυφόρων –H παρακολούθηση της πραγματικής θέσης των δορυφόρων.
. –Η μέτρηση της απόστασης επιτυγχάνεται με την μέτρηση του χρόνου που απαιτείται για να φτάσει ηλεκτομαγνητικό σήμα από το δορυφόρο στον δέκτη : d = c*t Τεχνικές προκλήσεις –Η απαίτηση για εξαιρετικά ακριβή μέτρηση χρόνου : Το σήμα κινείται με την ταχύτητα του φωτός, συνεπώς σφάλμα 1 nsec ισοδυναμεί με σφάλμα θέσης 0.3 m. –Η απαίτηση γι απόλυτο συγχρονισμό των ρολογιών των δορυφόρων –H παρακολούθηση της πραγματικής θέσης των δορυφόρων..")
36
Το σύστημα GPS Το παγκόσμιο σύστημα προσδιορισμού θέσης με την βοήθεια «φάρων»

37
Το σύστημα GPS Το παγκόσμιο σύστημα προσδιορισμού θέσης με την βοήθεια «φάρων» –Ατομικό ρολόι σε κάθε δορυφόρο –Επίγειοι διεσπαρμένοι σταθμοί για ακριβή παρακολούθηση της θέσης των δορυφόρων και για συγχρονισμό των ρολογιών τους. Πως λειτουργεί ο δέκτης : –Ο δέκτης συσχετίζει ψευδο- τυχαίο κώδικα με τον ίδιο κώδικα που λαμβάνει από τον δορυφόρο. –O χρόνος «καθυστέρησης» στην καλύτερη συσχέτιση αντιστοιχεί στον χρόνο πτήσης του σήματος. –Όταν εκκινεί ο δέκτης δεν έχει τον ίδιο χρόνο με τον δορυφόρο. Την διαφορά ΔΤ την χειρίζεται ως άγνωστο, οπότε μαζί με τις άγνωστες συντεταγμένες του (Χ,Υ,Ζ) χρειάζεται τέσσερις εξισώσεις για να τα προσδιορίσει. Χρειάζεται δηλαδή να λάβει σήμα από 4 δορυφόρους. Η ακρίβεια φτηνών (50€) εμπορικών δεκτών είναι σήμερα της τάξης των μερικών μέτρων.
 χρειάζεται τέσσερις εξισώσεις για να τα προσδιορίσει. Χρειάζεται δηλαδή να λάβει σήμα από 4 δορυφόρους. Η ακρίβεια φτηνών (50€) εμπορικών δεκτών είναι σήμερα της τάξης των μερικών μέτρων..")
38
Το «διαφορικό» GPS (Differential GPS, DGPS) Ένας δέκτης GPS τοποθετείται σε ακίνητος σε εντελώς συγκεκριμένη, γνωστή θέση.- σταθμός βάσης. Ο σταθμός βάσης υπολογίζει συνεχώς την θέση του με την βοήθεια των δορυφόρων κα την συγκρίνει με την γνωστή του θέση. Οι προκύπτουσες διαφορές – σφάλματα επηρεάζουν με τον ίδιο περίπου τρόπο και όλους τους υπόλοιπους δέκτες στην περιοχή που μας ενδιαφέρει. Αν συνεπώς αποστέλλονται σ’ αυτούς σε πραγματικό χρόνο, τότε η ακρίβεια μέτρησης μπορεί να βελτιωθεί δραματικά. Μπορεί σήμερα να μετρηθεί θέση με ακρίβεια cm!

39
Αισθητήρες μέτρησης απόστασης ( Range sensors) A. Time Of Flight - TOF Η πληροφορία απόστασης από αντικείμενα αποτελεί πολύτιμο δεδομένο στην προσπάθεια του ρομπότ να πλοηγηθεί : προσδιορισμός θέσης, αποφυγή εμποδίων. Μια από τις μεθόδους που χρησιμοποιούνται βασίζεται στην μέτρηση του χρόνου που χρειάζεται να μεταβεί «σήμα» που εκπέμπεται από τον δέκτη μέχρι τον στόχο και να επιστρέψει –Time Of Flight : emitter receiver

40
Αισθητήρες μέτρησης απόστασης ( Range sensors) A. Time Of Flight - TOF Τα «σήματα» που έχουν χρησιμοποιηθεί είναι : υπέρηχος και δέσμη laser Σημαντικά θέματα να παρατηρήσει κανείς : Ταχύτητα διάδοσης του ήχου στον αέρα : 0.3 m/ms Ταχύτητα διάδοσης δέσμης laser Q 0.3 m/ns, Ένα εκατομμύριο φορές γρηγορότερα. 3 μέτρα Αφορούν μέτρηση 10 ms για ένα αισθητήρα υπερήχων … Αλλά μόλις 10 ns για ένα αισθητήρα laser - > αρκετά δυσκολότερα να μετρηθεί με ακρίβεια… … για αυτό οι αντίστοιχοι αισθητήρες είναι ακριβοί (ακόμη..) Σφάλματα μέτρησης οφείλονται σε : Μη ακριβή μέτρηση του χρόνου πτήσης Μεταβολές της ταχύτητας διάδοσης (θερμοκρασία, υγρασία) του ήχου Ανακλάσεις από άλλα εμπόδια (ήχος) : βασικό πρόβλημα
 Σφάλματα μέτρησης οφείλονται σε : Μη ακριβή μέτρηση του χρόνου πτήσης Μεταβολές της ταχύτητας διάδοσης (θερμοκρασία, υγρασία) του ήχου Ανακλάσεις από άλλα εμπόδια (ήχος) : βασικό πρόβλημα.")
41
Αισθητήρες μέτρησης απόστασης Αισθητήρες υπερήχων Τυπικές συχνότητες: 40kHz - 180 kHz Δημιουργία του υπερήχου : piezo transducer Εύρος μέτρησης : Τυπικά 12 cm μέχρι 5 m Διακριτική ικανότητα ~ 2 cm Accuracy 98% => relative error 2% Ο υπέρηχος εκπέμπεται σε κωνική επιφάνεια με γωνία : Τυπικά 20 ο έως 40 ο. Typical intensity distribution of a ultrasonic sensor <http://www.robot-electronics.co.uk/ shop/Ultrasonic_Rangers1999.htm>

42
Laser Mετρησης Aποστασης Tα Laser μετρησης αποστασης (laser range finders) ανηκουν στη κατηγορια των TOF αισθητηριων και χρησιμοποιουνται για την πλοηγηση και αποφυγη εμποδιων απο το ρομποτ Αντι για υπερηχους (οπως στα sonar), εκπεμπεται δεσμη ακτινας laser και ανιχνευεται η επιστροφη της μετα απο ανακλαση σε καποιο αντικειμενο Η μεγαλη ταχυτητα μεταδοσης του φωτος, επιτρεπει την σαρωση μεγαλου γωνιακου ευρους σε μικρο χρονικο διαστημα Συγγραφέας : Δρ Μ.Σφακιωτάκης
 ανηκουν στη κατηγορια των TOF αισθητηριων και χρησιμοποιουνται για την πλοηγηση και αποφυγη εμποδιων απο το ρομποτ Αντι για υπερηχους (οπως στα sonar), εκπεμπεται δεσμη ακτινας laser και ανιχνευεται η επιστροφη της μετα απο ανακλαση σε καποιο αντικειμενο Η μεγαλη ταχυτητα μεταδοσης του φωτος, επιτρεπει την σαρωση μεγαλου γωνιακου ευρους σε μικρο χρονικο διαστημα Συγγραφέας : Δρ Μ.Σφακιωτάκης")
43
Laser Mετρησης Aποστασης Πλεονεκτηματα Mεγαλη εμβελεια (απο μετρα εως και χιλιομετρα, αναλογα με την ισχυ του laser και την εφαρμογη) Aυξημενη ακριβεια Tαχεια λειτουργια Kαταλληλα για μετρηση αντικειμενων απο μεγαλο ευρος υλικων Συγκριτικα φθηνη τεχνολογια πλεον (σε σχεση με τις παρεχομενες δυνατοτητες) Περιορισμοι Λογω της μεγαλης ταχυτητας διαδοσης του φωτος, ειναι προβληματικη η μετρηση αποστασεων μικροτερη του ~1m Περιορισμενες δυνατοτητες σε συνθηκες πολυ εντονου φωτισμου, καθως και παρουσια καπνου, ομιχλης κλπ Συγκριτικα μεγαλος ογκος και βαρος για χρηση σε μικρα ρομποτ Συγγραφέας : Δρ Μ.Σφακιωτάκης
 Aυξημενη ακριβεια Tαχεια λειτουργια Kαταλληλα για μετρηση αντικειμενων απο μεγαλο ευρος υλικων Συγκριτικα φθηνη τεχνολογια πλεον (σε σχεση με τις παρεχομενες δυνατοτητες) Περιορισμοι Λογω της μεγαλης ταχυτητας διαδοσης του φωτος, ειναι προβληματικη η μετρηση αποστασεων μικροτερη του ~1m Περιορισμενες δυνατοτητες σε συνθηκες πολυ εντονου φωτισμου, καθως και παρουσια καπνου, ομιχλης κλπ Συγκριτικα μεγαλος ογκος και βαρος για χρηση σε μικρα ρομποτ Συγγραφέας : Δρ Μ.Σφακιωτάκης")
44
Laser Yπολογισμου Aποστασης Kαι στη περιπτωση αυτη σημαντικο ρολο παιζει το ειδος της επιφανειας προσπτωσης Συγγραφέας : Δρ Μ.Σφακιωτάκης

45
Σαρωτές Laser H βασικη διαταξη μετρησης αποστασης μπορει να επιτυχει σαρωση για την παραγωγη 2D δεδομενων, συνδυαζομενη με καποιο μηχανικο συστημα περιστροφης Υλοποιειται με τη χρηση περιστρεφομενων καθρεπτων οι οποιοι στελνουν την παραγομενη δεσμη του laser σε διαφορετικες γωνιες Cyclone 2D laser scanner Eμβελεια Διακριτικη Iκανοτητα Aκριβεια Tαχυτητα Συχνοτητα Παλμων Eυρος Δεσμης μεχρι 50m 10cm 15cm 15 scans/sec 7200 Hz 2.5mrad Συγγραφέας : Δρ Μ.Σφακιωτάκης

46
SICK Laser Range Finder H Γερμανικη εταιρια SICK παρεχει διαφορα μοντελα μετρητικων συστηματων Laser, για χρηση σε διαφορες εφαρμογες LMS 200 Eμβελεια Διακριτικη Iκανοτητα Eυρος Σαρωσης Xρονος Σαρωσης Βαρος 2 - 150m 10 mm 100° - 180° (ανα 0.25°) 13 - 40msec 4.5 Kg Συγγραφέας : Δρ Μ.Σφακιωτάκης
 msec 4.5 Kg Συγγραφέας : Δρ Μ.Σφακιωτάκης")
47
Tρισδιαστατοι Σαρωτες Laser Προσφατες ερευνητικες δραστηριοτητες επιτυγχανουν τρισδιαστατη σαρωση χρησιμοποιωντας εναν 2D σαρωτη laser ο οποιος τοποθετειται σε βαση, η οποια επιτρεπει μεταβολη της κλισης του, μεσω σερβομηχανισμου H διαταξη της εικονας επιτρεπει τη ληψη μεχρι 30.280 μετρησεων (αποστασης και ανακλαστικοτητας), καλυπτοντας γωνιακο ευρος μεχρι 180° x 120° (οριζοντια x καθετα), και με ακριβεια εκατοστου Kοστος ~8500 Euros Συγγραφέας : Δρ Μ.Σφακιωτάκης
, καλυπτοντας γωνιακο ευρος μεχρι 180° x 120° (οριζοντια x καθετα), και με ακριβεια εκατοστου Kοστος ~8500 Euros Συγγραφέας : Δρ Μ.Σφακιωτάκης")
48
Tρισδιαστατοι Σαρωτες Laser O τρισδιαστατος σαρωτης βρισκει εφαρμογη και σε αυτοκινουμενα ρομποτ, για την ακριβη χαρτογραφηση των χωρων στους οποιους κινειται Eπιτρεπει ετσι την υλοποιηση πολυπλοκων αλγοριθμων πλοηγησης σε μη-γνωστα περιβαλλοντα H επεξεργασια της πληθωρας των δεδομενων που παρεχει ο σαρωτης ανεβαζει σημαντικα τις απαιτησεις σε υπολογιστικη ισχυ, ταχυτητα και μνημη για τον ελεγκτη κινησης Συγγραφέας : Δρ Μ.Σφακιωτάκης

49
Μέτρηση απόστασης με τριγωνισμό 49 Τα τελευταία χρόνια έχουν αναπτυχθεί αισθητήρες που χρησιμοποιούν την μέθοδο τριγωνισμού για να υπολογίσουν αποστάσεις. Χρησιμοποιούν είτε δέσμη laser είτε δέσμη υπερήθρων. H δέσμη που παράγεται στην συσκευή (1) κτυπά το ανιχνευόμενο σώμα και διαχέεται. Μέρος της διαχεόμενης δέσμης συλλέγεται από τον φακό (4) και εστιάζεται σε ευαίσθητο αισθητήρα (5) – Position Sensitive Detector. Η θέση του στίγματος της δέσμης επί του αισθητήρα σχετίζεται άμεσα με την απόσταση του αντικειμένου. Οι αισθητήρες laser που έχουν αναπτυχθεί με χρήση της μεθόδου αυτής μπορούν να μετρήσουν μικρές σχετικά αποστάσεις, με ακρίβεια της τάξης του 1μm! Μια εφαρμογή μέτρησης απόστασης με τέτοιες ακρίβειες, αφορά την συνεχή μέτρηση πάχους παραγομένων προϊόντων (χαρτί, πλαστικό, φύλλο λαμαρίνας κλπ) με μεγάλη ακρίβεια για λόγους ελέγχου της γραμμής παραγωγής ή για λόγους ποιότητας. 4
 κτυπά το ανιχνευόμενο σώμα και διαχέεται. Μέρος της διαχεόμενης δέσμης συλλέγεται από τον φακό (4) και εστιάζεται σε ευαίσθητο αισθητήρα (5) – Position Sensitive Detector. Η θέση του στίγματος της δέσμης επί του αισθητήρα σχετίζεται άμεσα με την απόσταση του αντικειμένου. Οι αισθητήρες laser που έχουν αναπτυχθεί με χρήση της μεθόδου αυτής μπορούν να μετρήσουν μικρές σχετικά αποστάσεις, με ακρίβεια της τάξης του 1μm. Μια εφαρμογή μέτρησης απόστασης με τέτοιες ακρίβειες, αφορά την συνεχή μέτρηση πάχους παραγομένων προϊόντων (χαρτί, πλαστικό, φύλλο λαμαρίνας κλπ) με μεγάλη ακρίβεια για λόγους ελέγχου της γραμμής παραγωγής ή για λόγους ποιότητας. 4.")
50
Μέτρηση απόστασης με τριγωνισμό 50 Οι αισθητήρας της σειράς GP2Dxx της Sharp ανήκουν επίσης στην κατηγορία αυτή. Πρόκειται για πολύ οικονομικούς αισθητήρες ( της τάξης των 10 € ) που μπορούν να μετρήσουν αποστάσεις από 10 cm έως ένα περίπου μέτρο με ακρίβεια εκατοστού.
 που μπορούν να μετρήσουν αποστάσεις από 10 cm έως ένα περίπου μέτρο με ακρίβεια εκατοστού..")
51
Time Of Flight Camera 51 H TOF κάμερα χρησιμοποιεί την ίδια αρχή μέτρησης όπως και οι συμβατικοί TOF αισθητήρες απόστασης, με την πολύ σημαντική διαφορά όμως, ότι μετριέται η απόσταση του αντικειμένου που εμφανίζεται σε κάθε pixel της εικόνας ταυτόχρονα. Η συσκευή χρησιμοποιεί πηγή υπερύθρων με την οποία «λούζει» όλη την σκηνή. Η ανακλώμενη ακτινοβολία επιστρέφει σε κάθε pixel του ειδικού αισθητήρα (Photonic Mixer Device) που χρησιμοποιεί με χρονική καθυστέρηση που εξαρτάται από την απόσταση. Αποστάσεις μέτρησης : Τυπικά 0,5 …10 m Διακριτική ικανότητα ανάγνωσης βάθους της τάξης του 1cm. Ανάλυση κάμερας μέτρια αλλά ταχύτητα άριστη : 100 fps http://www.bluetechnix.com/en/products/depthsensing/product/argos3d-p100/ Τυπικό παράδειγμα : Kinect (δεύτερης γενιάς)
 που χρησιμοποιεί με χρονική καθυστέρηση που εξαρτάται από την απόσταση. Αποστάσεις μέτρησης : Τυπικά 0,5 …10 m Διακριτική ικανότητα ανάγνωσης βάθους της τάξης του 1cm. Ανάλυση κάμερας μέτρια αλλά ταχύτητα άριστη : 100 fps Τυπικό παράδειγμα : Kinect (δεύτερης γενιάς).")
52
Μέτρηση “απόστασης” – range sensing 52 Η ακριβής μέτρηση της απόστασης αντικειμένων – και όχι απλώς η παρουσία τους - είναι πολλές φορές ζητούμενο σε ρομποτικές ή άλλες εφαρμογές αυτοματισμού. Χρησιμοποιούνται για τον σκοπό αυτό : Δύο κυρίως μέσα : ηχητικά κύματα και φωτεινές δέσμες. Και δύο μέθοδοι : Μέτρηση του χρόνου πτήσης του κύματος ή δέσμης (time of flight) Μέθοδος τριγωνισμού (triangulation) – για την περίπτωση της φωτεινής δέσμης μόνο. Sonar - Μέτρηση χρόνου πτήσης. Χρησιμοποιείται κατ΄ εξοχήν σε συσκευές που χρησιμοποιούν ηχητικά κύματα –τα λεγόμενα και sonars. Το όργανο διαθέτει πομπό (ηχείο) υπερήχου και δέκτη (μικρόφωνο). Εκπέμπεται ηχητικός παλμός που ανακλά στο σώμα και επιστρέφει στον δέκτη. Η μέτρηση του «χρόνου πτήσης» του παλμού μας δίδει την απόσταση. Πρόκειται για απλές και οικονομικές συσκευές που μπορούν να μετρήσουν αποστάσεις από μερικά εκατοστά μέχρι αρκετές δεκάδες μέτρα με «φτωχές» όμως ακρίβειες –της τάξης του εκατοστού. Εκτός από την χαμηλή ακρίβεια μειονέκτημα αποτελεί το γεγονός ότι το ηχητικό κύμα μπορεί να εκτραπεί προς άλλες κατευθύνσεις και να επιστρέψει ανακλώμενο από άλλα σώματα.
 Μέθοδος τριγωνισμού (triangulation) – για την περίπτωση της φωτεινής δέσμης μόνο. Sonar - Μέτρηση χρόνου πτήσης. Χρησιμοποιείται κατ΄ εξοχήν σε συσκευές που χρησιμοποιούν ηχητικά κύματα –τα λεγόμενα και sonars. Το όργανο διαθέτει πομπό (ηχείο) υπερήχου και δέκτη (μικρόφωνο). Εκπέμπεται ηχητικός παλμός που ανακλά στο σώμα και επιστρέφει στον δέκτη. Η μέτρηση του «χρόνου πτήσης» του παλμού μας δίδει την απόσταση. Πρόκειται για απλές και οικονομικές συσκευές που μπορούν να μετρήσουν αποστάσεις από μερικά εκατοστά μέχρι αρκετές δεκάδες μέτρα με «φτωχές» όμως ακρίβειες –της τάξης του εκατοστού. Εκτός από την χαμηλή ακρίβεια μειονέκτημα αποτελεί το γεγονός ότι το ηχητικό κύμα μπορεί να εκτραπεί προς άλλες κατευθύνσεις και να επιστρέψει ανακλώμενο από άλλα σώματα..")
53
Πυξίδα Ψηφιακού τύπου. Β’ Περίπτωση : O αισθητήρας διαθέτει (μικρο) επεξεργαστή ο οποίος αφού επεξεργασθεί το ηλεκτρικό σήμα διαθέτει την πληροφορία σε μορφή ψηφιακής λέξης στον Η/Υ. Η ‘επικοινωνία’ μπορεί να πραγματοποιηθεί με οποιονδήποτε τρόπο επικοινωνούν υπολογιστές …. Πρόκειται για πλέον πολύπλοκους και ακριβούς (προς το παρόν) αισθητήρες. Μια μέρα πάντως όλοι θα λειτουργούν έτσι ….
 επεξεργαστή ο οποίος αφού επεξεργασθεί το ηλεκτρικό σήμα διαθέτει την πληροφορία σε μορφή ψηφιακής λέξης στον Η/Υ. Η ‘επικοινωνία’ μπορεί να πραγματοποιηθεί με οποιονδήποτε τρόπο επικοινωνούν υπολογιστές …. Πρόκειται για πλέον πολύπλοκους και ακριβούς (προς το παρόν) αισθητήρες. Μια μέρα πάντως όλοι θα λειτουργούν έτσι …..")
54
Μετρητής παραμόρφωσης (Strain gauge) Πρόκειται για πολύ λεπτό συρματίδιο διατεθειμένο σε μορφή μαιάνδρου (ή στρώμα ημιαγωγού υλικού) και ενσωματωμένο σε λεπτό φύλλο πλαστικού. Η παραμόρφωσή του μεταβάλει την ηλεκτρική αντίσταση του συρματιδίου ή του ημιαγωγού υλικού. Η μεταβολή μετράται με την βοήθεια κατάλληλης γέφυρας.

55
Μετρητής παραμόρφωσης (Strain gauge) Ισχύει : ΔR/R=ε*k όπου ε =Δl/L : επιμήκυνση για την οποία στην ελαστική περιοχή όπου ισχύει ο νόμος του Hook έχομε ε = σ/Ε : σ = τάση του συρματιδίου Ε = μέτρο ελαστικότητας του Joung k : Συντελεστής μέτρησης Για συρματίδιο από κονσταντάνη που συνήθως χρησιμοποιείται, ο συντελεστής k = 2.052. Με ένα τέτοιο υλικό έχομε την δυνατότητα να μετρήσομε παραμορφώσεις της τάξης του 1μm / μέτρο ! Πραγματικά αυτή η παραμόρφωση επιφέρει μια αύξηση στην αντίσταση της τάξης των 2x10-6. Αυτή η απειροελάχιστη αύξηση της αντίστασης είναι μετρήσιμη - με γέφυρα και ενισχυτή.

56
Γέφυρα μέτρησης Αν R1/R2 = R3/R4 Τότε Ε 0 = 0 => Γέφυρα σε ισορροπία Μικρές μεταβολές σε μια αντίσταση οδηγεί σε ανισσοροπία δηλαδή στην εμφάνιση μικρής τάσης Εο. Ο μετρητής παραμόρφωσης παίρνει την θέση μιας από τις αντιστάσεις. EiEi EoEo R1R1 R2R2 R4R4 R3R3

57
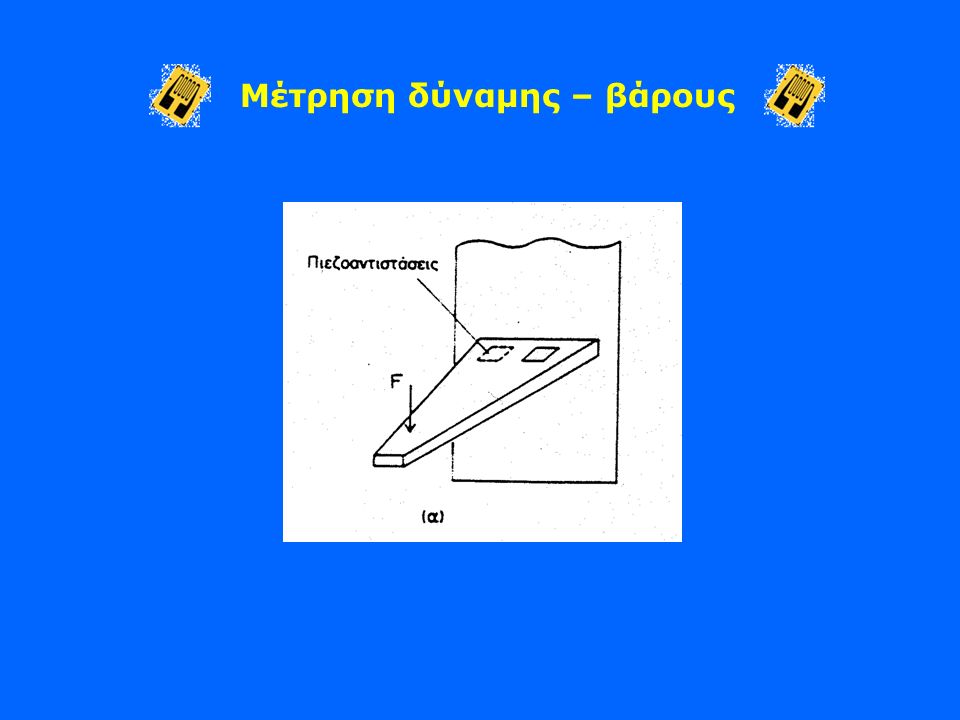
Μέτρηση δύναμης – βάρους Ο μετρητής παραμόρφωσης προσκολλάται σε μεταλλικό στοιχείο επί του οποίου εφαρμόζεται η προς μέτρηση δύναμη. Για την ελαστική περιοχή, η παραγώμενη τάση από τον ενισχυτή είναι ανάλογη του επιβαλλόμενου φορτίου. V R2R1 Ενισχυτής e R3 Ράβδος της οποίας μετράμε την παραμόρφωση Μηκυνσιόμετρο

58
Μέτρηση δύναμης – βάρους

61
Μέτρηση ροπής

62
Τροφοδοσία της γέφυρας

63
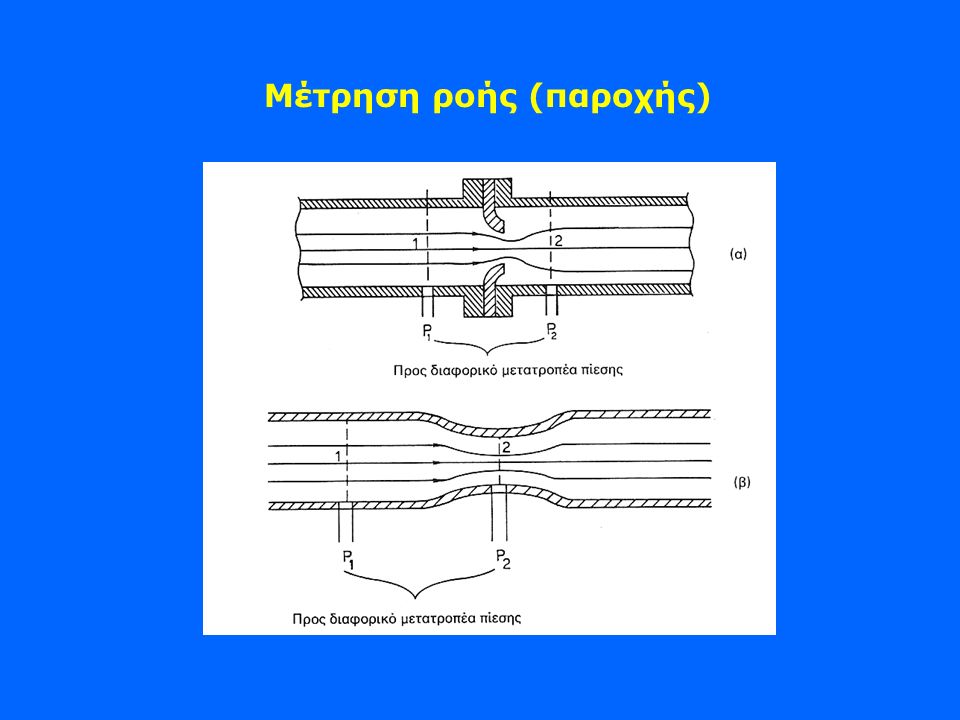
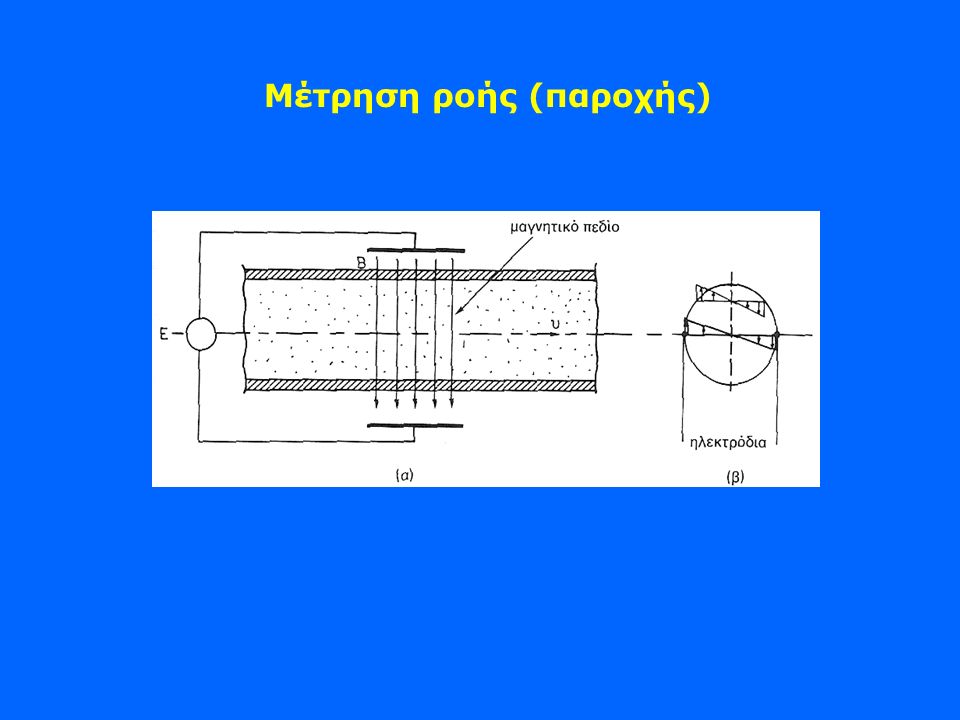
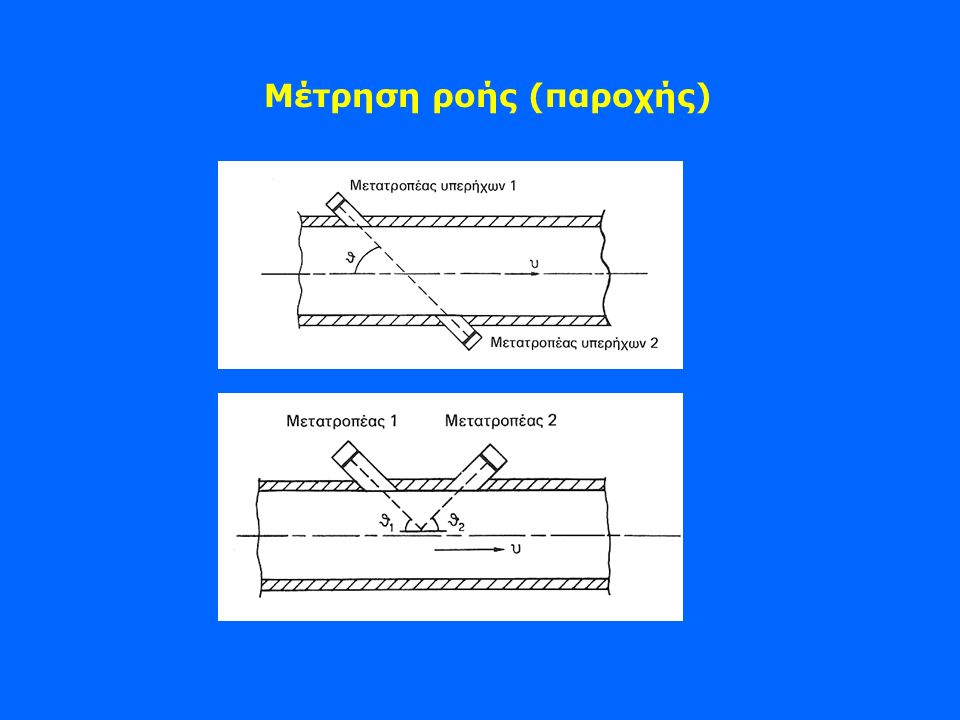
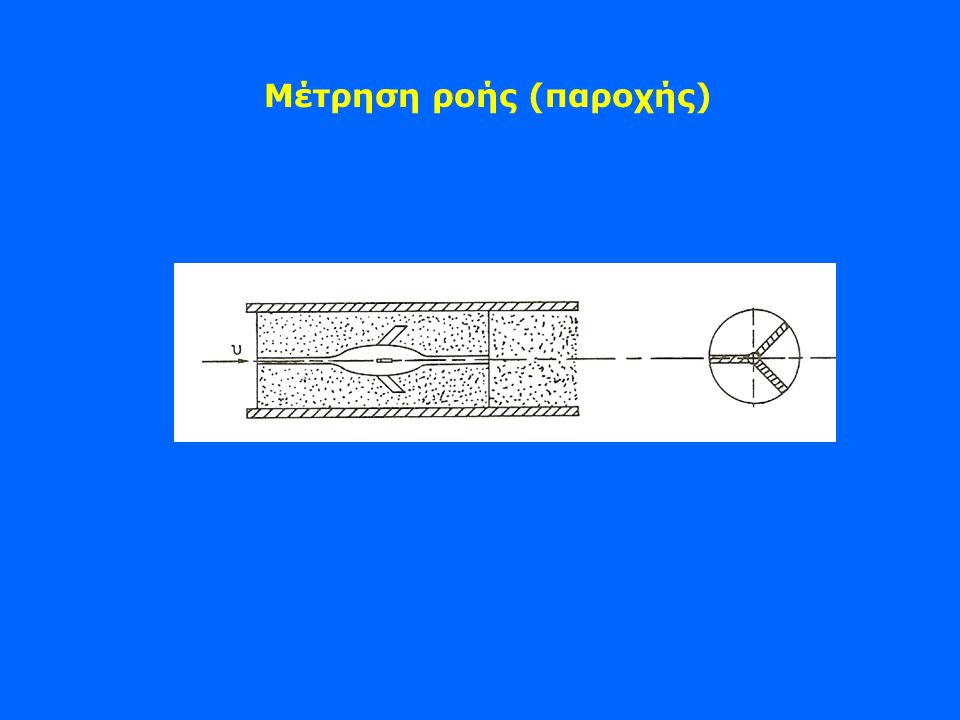
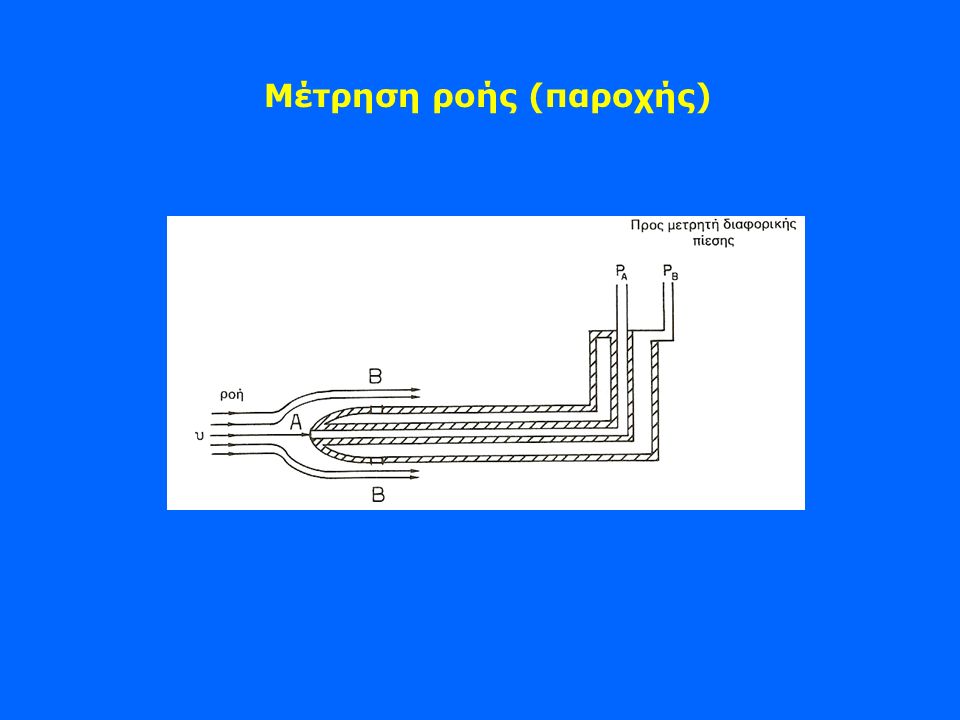
Μέτρηση ροής (παροχής)
")
69
Αισθητήρες πίεσης

71
Αισθητήρες θερμοκρασίας Αισθητήρια αντίστασης Resistance Temperature Detectors Αρχή λειτουργίας ίδια με του μετρητή παραμόρφωσης : Η θερμοκρασία μετράται με την βοήθεια της μεταβολής που επιφέρει στην ηλεκτρική αντίσταση κατάλληλα επιλεγμένου στοιχείου. Κατά τα άλλα χρησιμοποιείται και πάλι διάταξη γέφυρας και ενισχυτή.

72
Αισθητήρες θερμοκρασίας Θερμίστορς Μια σειρά από ημιαγωγά υλικά παρουσιάζουν την έντονη εξάρτηση αντίστασης από την θερμοκρασία που φαίνεται στο σχήμα. Προφανώς είναι κατάλληλα για μέτρηση μιας περιοχής θερμοκρασιών. Τα προκύπτοντα αισθητήρια ονομάζονται θερμίστορς.

73
Αισθητήρες θερμοκρασίας Θερμοστοιχείο (Thermocouple) θ1θ1 θ2θ2 Θερμή επαφή ψυχρή επαφή V (Μικρή τάση) Θερμοηλεκτρικό φαινόμενο Όταν δύο διαφορετικοί μεταλλικοί αγωγοί ενωθούν σε δύο σημεία – επαφές και οι εν λόγω επαφές εκτεθούν σε διαφορετικές θερμοκρασίες, τότε αναπτύσσεται τάση. Η εν λόγω τάση είναι : πολύ μικρή (τάξης mV) Εξαρτάται και από τις δύο θερμοκρασίες πρακτικά ανεξάρτητη του μήκους των αγωγών
 Εξαρτάται και από τις δύο θερμοκρασίες πρακτικά ανεξάρτητη του μήκους των αγωγών.")
74
Αισθητήρες θερμοκρασίας Θερμοστοιχείο (Thermocouple) θ Θερμή επαφή ψυχρή επαφή – θερμοκρασία περιβάλλοντος v Το φαινόμενο παρατηρείται και με την συνδεσμολογία του σχήματος οπότε και προκύπτει ένας εξαιρετικά απλός αισθητήρας θερμοκρασίας Που ονομάζεται θερμοζεύγος ή θερμοστοιχείο
 θ Θερμή επαφή ψυχρή επαφή – θερμοκρασία περιβάλλοντος v Το φαινόμενο παρατηρείται και με την συνδεσμολογία του σχήματος οπότε και προκύπτει ένας εξαιρετικά απλός αισθητήρας θερμοκρασίας Που ονομάζεται θερμοζεύγος ή θερμοστοιχείο")
75
Αισθητήρες θερμοκρασίας Θερμοστοιχείο (Thermocouple) Πρακτικά χρησιμοποιούνται συγκεκριμένα ζεύγη μετάλλων για τα οποία το φαινόμενο είναι πιο έντονο. Τα προκύπτοντα θερμοζέύγη χαρακτηρίζονται με ένα λατινικό κεφαλαίο γράμμα. Οι υπάρχουσες χαρακτηριστικές ισχύουν για θερμοκρασία ψυχρής επαφής 0 ο C.

76
Αισθητήρες θερμοκρασίας Θερμοστοιχείο (Thermocouple) θ1θ1 θ2θ2 V1V1 Ιδιότητα ίδιων θερμοζευγών θ2θ2 θ3θ3 V2V2 θ1θ1 θ3θ3 V1+V2V1+V2 Χρησιμοποιούμε την ιδιότητα για θ 1 : την προς μέτρηση θερμοκρασία, θ 2 : θερμοκρασία περιβάλλοντος και θ 3 : 0 ο C. Το θερμοστοιχείο μας είναι αυτό της άνω δεξιά κατάστασης, και μας δίδει τάση V1. Αν γνωρίζομε την θερμοκρασία περιβάλλοντος, τότε από την καμπύλη του θερμοστοιχείου, έχομε το V2. Γνωρίζοντας το V1+V2, από την καμπύλη και πάλι προσδιορίζομε την ζητούμενη θερμοκρασία θ1.

Παρόμοιες παρουσιάσεις




 είναι ένας μηχανικός διακόπτης, του οποίου οι επαφές ελέγχονται από έναν ηλεκτρομαγνήτη. Ο ηλεκτρονόμος είναι ένα.>")
>")
 1. ΘΕΩΡΙΑ ΤΗΣ ΤΗΛΕΠΙΚΟΙΝΩΝΙΑΚΗΣ ΚΙΝΗΣΗΣ Εκτός από τις τερματικές.>")





 του υπολογιστή, περιλαμβάνει ένα καθοδικό σωλήνα, όπως η τηλεόραση, και κατάλληλα κυκλώματα σάρωσης. Μπορεί να είναι έγχρωμη.>")

 είναι ένας μηχανικός διακόπτης, του οποίου οι επαφές ελέγχονται από έναν ηλεκτρομαγνήτη. Ο ηλεκτρονόμος είναι ένα.>")
>")



