Κατέβασμα παρουσίασης
Η παρουσίαση φορτώνεται. Παρακαλείστε να περιμένετε

1
ΣΗΜΑΤΑ ΚΑΙ ΣΥΣΤΗΜΑΤΑ II Καθ. Πέτρος Π. Γρουμπός Διάλεξη 6η Φίλτρα

2
Τα σήματα περιέχουν πληροφορία αναμεμιγμένη με θόρυβο. Βασικό βήμα – ο προσδιορισμός χαρακτηριστικών τα οποία διαφοροποιούν τα δύο είδη σημάτων, προκειμένου να επιτύχουμε απομάκρυνση του θορύβου. Οι μέθοδοι επεξεργασίας στηρίζονται στη Βασική Υπόθεση (το σήμα πληροφορίας και ο θόρυβος δεν έχουν κοινές συχνότητες και επομένως διαφοροποιούνται μέσω των συχνοτήτων τους). Εισαγωγή Η υιοθέτηση της Βασικής Υπόθεσης επιτρέπει την πλήρη απομάκρυνση του θορύβου με απλή γνώση των συχνοτικών ζωνών του σήματος πληροφορίας και θορύβου (δίχως να είναι απαραίτητη η ακριβής γνώση του συχνοτικού περιεχομένου των σημάτων). Υπάρχουν πολλές εφαρμογές στις οποίες η Βασική Υπόθεση είναι αληθής ή τουλάχιστον πολύ κοντά στην πραγματικότητα. Όταν η Βασική Υπόθεση δεν ισχύει χρησιμοποιούνται πιο προχωρημένες τεχνικές επεξεργασίας
. Εισαγωγή Η υιοθέτηση της Βασικής Υπόθεσης επιτρέπει την πλήρη απομάκρυνση του θορύβου με απλή γνώση των συχνοτικών ζωνών του σήματος πληροφορίας και θορύβου (δίχως να είναι απαραίτητη η ακριβής γνώση του συχνοτικού περιεχομένου των σημάτων). Υπάρχουν πολλές εφαρμογές στις οποίες η Βασική Υπόθεση είναι αληθής ή τουλάχιστον πολύ κοντά στην πραγματικότητα. Όταν η Βασική Υπόθεση δεν ισχύει χρησιμοποιούνται πιο προχωρημένες τεχνικές επεξεργασίας.")
3
Εισαγωγή Η Βασική Υπόθεση επιτρέπει την απομάκρυνση του θορύβου με τη χρήση απλών γραμμικών, χρονικά σταθερών, συστημάτων. Τα συστήματα αυτά καλούνται φίλτρα και η αντίστοιχη επεξεργασία φιλτράρισμα. Ο σχεδιασμός συστημάτων που επιτρέπουν την ολική ή μερική εξάλειψη των θορύβων οι οποίοι έχουν υπερτεθεί σε ένα χρήσιμο σήμα είναι μία από τις σημαντικότερες εφαρμογές των μετασχηματισμών Fourier. Τα συστήματα που επιτελούν αυτό το έργο ονομάζονται φίλτρα (filters). Έστω ένα σήμα z(t) αποτέλεσμα της υπέρθεσης των σημάτων x(t) και n(t) Το πρόβλημα της διηθήσεως (filtering) συνίσταται στον απομάκρυνση του θορύβου από το σήμα z(t) όπου x(t) υποδηλώνει ένα χρήσιμο σήμα και n(t) τον υπερτιθέμενο θόρυβο (noise).
. Έστω ένα σήμα z(t) αποτέλεσμα της υπέρθεσης των σημάτων x(t) και n(t) Το πρόβλημα της διηθήσεως (filtering) συνίσταται στον απομάκρυνση του θορύβου από το σήμα z(t) όπου x(t) υποδηλώνει ένα χρήσιμο σήμα και n(t) τον υπερτιθέμενο θόρυβο (noise)..")
4
Αναλογικά και Ψηφιακά Φίλτρα Φίλτρα που εφαρμόζονται στην επεξεργασία ψηφιακών σημάτων καλούνται ψηφιακά. Oι προδιαγραφές καθώς και ο όλος σχεδιασμός των φίλτρων πραγματοποιείται στο πεδίο της συχνότητας. Φίλτρα με τα οποία επεξεργαζόμαστε αναλογικά σήματα καλούνται αναλογικά Θα επικεντρωθούμε σε φίλτρα πού είναι γραμμικά χρονικά σταθερά συστήματα, και: Μπορούν να περιγραφούν πλήρως, από την κρουστική τους απόκριση h(t) (για αναλογικά) και h n (για ψηφιακά), τη συνάρτηση μεταφοράςH(s) και H(z) αντίστοιχα. Σημαντικότερο ρόλο στο σχεδιασμό ενός φίλτρου παίζει η απόκριση συχνότητας, H(jΩ) για αναλογικά, H(e Jω ) για ψηφιακά.
 (για αναλογικά) και h n (για ψηφιακά), τη συνάρτηση μεταφοράςH(s) και H(z) αντίστοιχα. Σημαντικότερο ρόλο στο σχεδιασμό ενός φίλτρου παίζει η απόκριση συχνότητας, H(jΩ) για αναλογικά, H(e Jω ) για ψηφιακά..")
5
Διαφορές Αναλογικών – Ψηφιακών Φίλτρων Δεν είναι ισοδύναμα, ως προς τη συμπεριφορά τους σε πρακτικές εφαρμογές 1.Αναλογικά φίλτρα υλοποιούνται με κλασικά ηλεκτρικά αναλογικά κυκλώματα (επεξεργασία σημάτων χωρίς καμία καθυστέρηση). Ψηφιακά φίλτρα υλοποιούνται με βοήθεια ψηφιακών επεξεργαστών (καθυστέρηση στην επεξεργασία συναρτήσει πολυπλοκότητας επεξεργασίας και ταχύτητας επεξεργαστή) 2.Χαρακτηριστικές των αναλογικών φίλτρων είναι συνάρτηση των τιμών των στοιχείων των ηλεκτρικών κυκλωμάτων (αλλάζουν με θερμοκρασία, υγρασία, γήρανση, με αποτέλεσμα να μεταβάλλονται και οι αντίστοιχες χαρακτηριστικές των φίλτρων) Ψηφιακά φίλτρα απολύτως σταθερά (εφόσον ο επεξεργαστής λειτουργεί σωστά) 3.Με ψηφιακά φίλτρα προσεγγίζονται οι ιδανικές προδιαγραφές με οποιαδήποτε επιθυμητή ακρίβεια. Αντίστοιχη ιδιότητα δεν διαθέτουν (πρακτικά) τα αναλογικά φίλτρα (απαιτεί πολύπλοκα κυκλώματα με απροσδιόριστα αποτελέσματα)
 2.Χαρακτηριστικές των αναλογικών φίλτρων είναι συνάρτηση των τιμών των στοιχείων των ηλεκτρικών κυκλωμάτων (αλλάζουν με θερμοκρασία, υγρασία, γήρανση, με αποτέλεσμα να μεταβάλλονται και οι αντίστοιχες χαρακτηριστικές των φίλτρων) Ψηφιακά φίλτρα απολύτως σταθερά (εφόσον ο επεξεργαστής λειτουργεί σωστά) 3.Με ψηφιακά φίλτρα προσεγγίζονται οι ιδανικές προδιαγραφές με οποιαδήποτε επιθυμητή ακρίβεια. Αντίστοιχη ιδιότητα δεν διαθέτουν (πρακτικά) τα αναλογικά φίλτρα (απαιτεί πολύπλοκα κυκλώματα με απροσδιόριστα αποτελέσματα).")
6
Διαφορές Αναλογικών – Ψηφιακών Φίλτρων 4.Ψηφιακά φίλτρα (πεπερασμένης κρουστικής απόκρισης) έχουν πολύ μεγάλη ευελιξία στο σχεδιασμό τους. Αναλογικά φίλτρα περιορίζονται στην υλοποίηση των λεγόμενων κλασικών φίλτρων. 5.Ορισμένα φίλτρα (αντιαναδίπλωσης και ανακατασκευής) δεν μπορεί να είναι παρά μόνο αναλογικά
 δεν μπορεί να είναι παρά μόνο αναλογικά.")
7
Αναλογικά Φίλτρα Υλοποιούνται με κλασικά ηλεκτρικά κυκλώματα Η σχέση μεταξύ πηγής (εισόδου) και οποιασδήποτε τάσης ή έντασης στο κύκλωμα (εξόδου), στο πεδίο του Μετασχηματισμού Laplace, είναι της μορφής Η συνάρτηση μεταφοράς του κυκλώματος είναι λόγος πολυωνύμων του s. Ο βαθμός του πολυωνύμου του παρονομαστή L καλείται τάξη του φίλτρου. Για την περιορισμένη αυτή κλάση φίλτρων δεν είναι δυνατή η υλοποίηση οιουδήποτε λόγου πολυωνύμων του s με κλασικά κυκλώματα.

8
Ιδιότητα Ευστάθειας και Αιτιατότητας Φίλτρα που είναι γραμμικά χρονικά σταθερά συστήματα θα πρέπει να διέπονται από την βασική ιδιότητα της ευστάθειας (ώστε αποτέλεσμα επεξεργασίας να έχει πρακτικό νόημα) Επίσης θα πρέπει τα συστήματα αυτά να είναι αιτιατά (ώστε για τον υπολογισμό της εξόδου τη χρονική στιγμή n να χρησιμοποιούνται είσοδοι που είναι διαθέσιμες έως τη χρονική αυτή στιγμή) Από συνδυασμό ευστάθειας και αιτιατότητας απορρέουν συνθήκες που εξασφαλίζουν ευστάθεια στα συστήματα που μας ενδιαφέρουν. Οι περιορισμοί ανά κατηγορία φίλτρου είναι οι ακόλουθοι: Τα FIR ψηφιακά φίλτρα είναι πάντοτε ευσταθή. Τα IIR ψηφιακά φίλτρα είναι ευσταθή, όταν οι πόλοι (ρίζες του παρονομαστή) της συνάρτησης μεταφοράς βρίσκονται στο εσωτερικό του μοναδιαίου κύκλου. Τα IIR αναλογικά φίλτρα είναι ευσταθή, όταν οι πόλοι (ρίζες του παρονομαστή) της συνάρτησης μεταφοράς βρίσκονται στο αρνητικό μιγαδικό ημιεπίπεδο.
 της συνάρτησης μεταφοράς βρίσκονται στο εσωτερικό του μοναδιαίου κύκλου. Τα IIR αναλογικά φίλτρα είναι ευσταθή, όταν οι πόλοι (ρίζες του παρονομαστή) της συνάρτησης μεταφοράς βρίσκονται στο αρνητικό μιγαδικό ημιεπίπεδο..")
9
Φίλτρα Αποκοπής Συχνοτήτων Η ιδέα στην οποία βασίζεται η θεωρία των φίλτρων αποκοπής συχνοτήτων συνίσταται στην υπόθεση ότι το περιεχόμενο συχνοτήτων του χρήσιμου σήματος είναι ξένο προς το αντίστοιχο περιεχόμενο του θορύβου. Κατά συνέπεια, η επιβολή του σήματος z(t) σαν είσοδος σε ένα σύστημα το οποίο αφήνει να “περνούν οι συχνότητες του περιεχομένου του χρήσιμου σήματος ενώ “εμποδίζουν” την διέλευση των συχνοτήτων που δεν ανήκουν στο περιεχόμενο αυτό θα έχει αποτέλεσμα την απαλλαγή του χρήσιμου σήματος από τον ανεπιθύμητο θόρυβο. Το φίλτρο είναι το σύστημα εκείνο στο οποίο αν επιβληθεί σαν είσοδος το σήμα z(t)=x(t)+n(t) τότε έχει σαν αποτέλεσμα να δίνει στην έξοδο το σήμα x(t). Φίλτρα αποκοπής συχνοτήτων.
 σαν είσοδος σε ένα σύστημα το οποίο αφήνει να περνούν οι συχνότητες του περιεχομένου του χρήσιμου σήματος ενώ εμποδίζουν την διέλευση των συχνοτήτων που δεν ανήκουν στο περιεχόμενο αυτό θα έχει αποτέλεσμα την απαλλαγή του χρήσιμου σήματος από τον ανεπιθύμητο θόρυβο. Το φίλτρο είναι το σύστημα εκείνο στο οποίο αν επιβληθεί σαν είσοδος το σήμα z(t)=x(t)+n(t) τότε έχει σαν αποτέλεσμα να δίνει στην έξοδο το σήμα x(t). Φίλτρα αποκοπής συχνοτήτων..")
10
Φίλτρα Αποκοπής Συχνοτήτων Τα φίλτρα συχνοτήτων διακρίνονται σε τρείς κατηγορίες Τα βαθυπερατά φίλτρα (lowpass filters) τα οποία αφήνουν να περάσουν οι χαμηλές συχνότητες δηλαδή οι συχνότητες ω που ικανοποιούν μία ανισότητα της μορφής |ω|≤ω c ενώ αποκόπτουν τις υψηλές συχνότητες δηλαδή τις συχνότητες για τις οποίες ισχύει η ανισότητα |ω|>ω c Τα ζωνοπερατά φίλτρα (bandpass filters) τα οποία αφήνουν να περάσουν οι συχνότητες που ανήκουν σε μία ζώνη ω cm ≤|ω|≤ω cM ενώ αποκόπτουν τις συχνότητες εκτός της ζώνης αυτής Τα υψιπερατά φίλτρα (highpass filters) αφήνουν να περάσουν οι υψηλές συχνότητες δηλαδή οι συχνότητες ω που ικανοποιούν μία ανισότητα της μορφής |ω|≥ω c ενώ αποκόπτουν τις χαμηλές συχνότητες δηλαδή τις συχνότητες για τις οποίες ισχύει η ανισότητα |ω|<ω c
 τα οποία αφήνουν να περάσουν οι χαμηλές συχνότητες δηλαδή οι συχνότητες ω που ικανοποιούν μία ανισότητα της μορφής |ω|≤ω c ενώ αποκόπτουν τις υψηλές συχνότητες δηλαδή τις συχνότητες για τις οποίες ισχύει η ανισότητα |ω|>ω c Τα ζωνοπερατά φίλτρα (bandpass filters) τα οποία αφήνουν να περάσουν οι συχνότητες που ανήκουν σε μία ζώνη ω cm ≤|ω|≤ω cM ενώ αποκόπτουν τις συχνότητες εκτός της ζώνης αυτής Τα υψιπερατά φίλτρα (highpass filters) αφήνουν να περάσουν οι υψηλές συχνότητες δηλαδή οι συχνότητες ω που ικανοποιούν μία ανισότητα της μορφής |ω|≥ω c ενώ αποκόπτουν τις χαμηλές συχνότητες δηλαδή τις συχνότητες για τις οποίες ισχύει η ανισότητα |ω|<ω c")
11
Ιδανικές Προδιαγραφές Φίλτρων Ένα ιδανικό φίλτρο (ideal filter) είναι εκείνο το οποίο αφήνει αναλλοίωτα τα σήματα με περιεχόμενο συχνοτήτων που περιέχεται στην ζώνη διελεύσεώς του ενώ αποκόπτει πλήρως τα σήματα των οποίων το περιεχόμενο συχνοτήτων ευρίσκεται εκτός της ζώνης διελεύσεώς του. Ένα φίλτρο είναι ιδανικό αν δεν παραμορφώνει τα σήματα των οποίων το περιεχόμενο συχνοτήτων εμπεριέχεται στην ζώνη διελεύσεώς του.

12
(α) Παράδειγμα συχνοτικού περιεχομένου πληροφορίας και θορύβου (β) Ιδανική χαρακτηριστική φίλτρου που φιλτράρει εντελώς το θόρυβο Ιδανικές Προδιαγραφές Φίλτρων
 Παράδειγμα συχνοτικού περιεχομένου πληροφορίας και θορύβου (β) Ιδανική χαρακτηριστική φίλτρου που φιλτράρει εντελώς το θόρυβο Ιδανικές Προδιαγραφές Φίλτρων")
13
Παράδειγμα γενικής ιδανικής χαρακτηριστικής φίλτρου

14
Είδη Κλασσικών Ιδανικών Φίλτρων

15
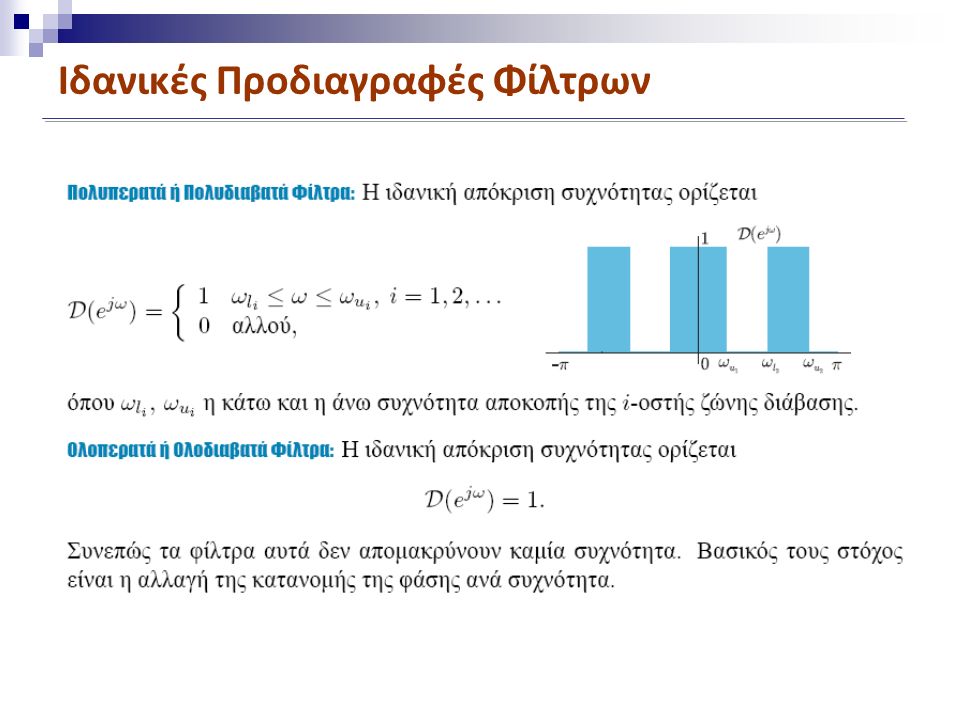
Ιδανικές Προδιαγραφές Φίλτρων

17
Γραμμικά Ιδανικά Φίλτρα Ένα σύστημα δεν παραμορφώνει την είσοδό του x(t) αν είτε την ενισχύει ομοιόμορφα είτε/και την μετατοπίζει ομοιόμορφα, που σημαίνει ότι η έξοδός του y(t) είναι της μορφής Αν θεωρήσουμε ότι το εν λόγω σύστημα είναι γραμμικό και χρονικά ανεξάρτητο με συνάρτηση μεταφοράς Η(ω), τότε θα πρέπει να ισχύει ή γιατί Για να ισχύει η σχέση ke -jωτ, θα πρέπει να ισχύουν για όλες τις τιμές των συχνοτήτων που ανήκουν στην περιοχή διελεύσεως του φίλτρου., Ας δούμε τώρα πως εξειδικεύεται το συμπέρασμα αυτό για τις διάφορες κατηγορίες ιδανικών γραμμικών φίλτρων
 αν είτε την ενισχύει ομοιόμορφα είτε/και την μετατοπίζει ομοιόμορφα, που σημαίνει ότι η έξοδός του y(t) είναι της μορφής Αν θεωρήσουμε ότι το εν λόγω σύστημα είναι γραμμικό και χρονικά ανεξάρτητο με συνάρτηση μεταφοράς Η(ω), τότε θα πρέπει να ισχύει ή γιατί Για να ισχύει η σχέση ke -jωτ, θα πρέπει να ισχύουν για όλες τις τιμές των συχνοτήτων που ανήκουν στην περιοχή διελεύσεως του φίλτρου., Ας δούμε τώρα πως εξειδικεύεται το συμπέρασμα αυτό για τις διάφορες κατηγορίες ιδανικών γραμμικών φίλτρων")
18
Ιδανικό Γραμμικό Βαθυπερατό Φίλτρο Η συνάρτηση μεταφοράς H(ω)=|H(ω)|e jφ(ω) του ιδανικού βαθυπερατού φίλτρου ικανοποιεί τις σχέσεις Το φάσμα πλάτους της κρουστικής αποκρίσεως h(t) ιδανικού γραμμικού βαθυπερατου φίλτρου Tο φάσμα φάσεως της κρουστικής αποκρίσεως h(t) ιδανικού γραμμικού βαθυπερατου φίλτρου Η κρουστική απόκριση του ιδανικού βαθυπερατού φίλτρου προσδιορίζεται υπολογίζοντας τον αντίστροφο μετασχηματισμό Fourier:
=|H(ω)|e jφ(ω) του ιδανικού βαθυπερατού φίλτρου ικανοποιεί τις σχέσεις Το φάσμα πλάτους της κρουστικής αποκρίσεως h(t) ιδανικού γραμμικού βαθυπερατου φίλτρου Tο φάσμα φάσεως της κρουστικής αποκρίσεως h(t) ιδανικού γραμμικού βαθυπερατου φίλτρου Η κρουστική απόκριση του ιδανικού βαθυπερατού φίλτρου προσδιορίζεται υπολογίζοντας τον αντίστροφο μετασχηματισμό Fourier:")
19
Ιδανικό Γραμμικό Ζωνοδιαβατό Φίλτρο Η συνάρτηση μεταφοράς H(ω)= | H(ω) | e jφ(ω) του ιδανικού ζωνοδιαβατού φίλτρου ικανοποιεί τις σχέσεις Το φάσμα πλάτους της κρουστικής αποκρίσεως ιδανικού γραμμικού ζωνοπερατού φίλτρου Το φάσμα φάσεως της κρουστικής αποκρίσεως ιδανικού γραμμικού ζωνοπερατού φίλτρου
= | H(ω) | e jφ(ω) του ιδανικού ζωνοδιαβατού φίλτρου ικανοποιεί τις σχέσεις Το φάσμα πλάτους της κρουστικής αποκρίσεως ιδανικού γραμμικού ζωνοπερατού φίλτρου Το φάσμα φάσεως της κρουστικής αποκρίσεως ιδανικού γραμμικού ζωνοπερατού φίλτρου")
20
Ιδανικό Γραμμικό Υψιπερατό Φίλτρο Η συνάρτηση μεταφοράς H(ω) =| H(ω) | e jφ(ω) του ιδανικού υψιπερατού φίλτρου ικανοποιεί τις σχέσεις: Το φάσμα πλάτους της κρουστικής αποκρίσεως ιδανικού γραμμικού υψιπερατού φίλτρου Το φάσμα φάσεως της κρουστικής αποκρίσεως ιδανικού γραμμικού υψιπερατού φίλτρου
 =| H(ω) | e jφ(ω) του ιδανικού υψιπερατού φίλτρου ικανοποιεί τις σχέσεις: Το φάσμα πλάτους της κρουστικής αποκρίσεως ιδανικού γραμμικού υψιπερατού φίλτρου Το φάσμα φάσεως της κρουστικής αποκρίσεως ιδανικού γραμμικού υψιπερατού φίλτρου")
21
Ιδανικό Γραμμικό Υψιπερατό Φίλτρο Η κρουστική απόκριση του ιδανικού υψιπερατού φίλτρου προσδιορίζεται υπολογίζοντας τον αντίστροφο μετασχηματισμό Fourier: Τα ιδανικά γραμμικά φίλτρα δεν μπορούν να υλοποιηθούν γιατί δεν είναι αιτιατά.

Παρόμοιες παρουσιάσεις